

1. Introduction
A tower crane is one of the most common fixtures used at any major high-rise building construction site. Crane is usually comprised of the vertical mast and horizontal boom or jib and its counterweights to balance boom and payload weight. The boom is equipped with a winch used for hoisting and lowering loads. Risks associated with such a high tower crane results in collateral damages and often cause human lives to be lost in residential areas. Tower cranes are widely used at construction and industrial sites to lift heavy loads such as sandbags, bricks, concrete slabs, cement mixing machines, etc. For this work, the tower crane stands vertically up to 100 m or more as per the requirement. The static and dynamic stability of the tower crane is a significant concern at such a height to avoid any structural failures due to natural disasters. To understand this, some of the research studies conducted in the past are summarised in the literature survey as follows.
Huang and Syu, (2014) conducted a seismic response analysis on the tow crane to measure ground acceleration. Feng and Yoo, (2005) observed a significant effect on dynamic characteristics due to changes in jib angle and additional bracing on the vertical mast. Ju et al. (2006) studied spherical and planar pendulum motion using a governing equation based on Lagrange’s equation and computational method. Florentin and Oliver, (2017) discussed payload stabilizing control design by discretizing the partial differential equation using finite differences and performing the modal order reduction to represent slewing dynamics. Rubio et al. (2008) eliminated the anchor in the tower crane and replaced it with a sliding counterweight trolley. Optimal performance was checked by PID control. Yang et al. (2007) used Euler’s Bernoulli beam theory for the dynamic modelling of a tower crane containing a flexible slewing beam along with a moving payload pendulum. Non-linear coupled equations of motion are derived by using the Hamilton principle for payload pendulum and in and out of the beam plane. The combined equation of motion is derived as:
M¨q+F(˙q,q)=0
q={φ,Ψ,η1,η2,…ηn,p1,p2,……pn}T
where M= mass matrix of the system and T denotes transpose. Krzysztof et al (2017) used two systems to measure the stress in the tower crane mast. In the first system, TCRA1102+ and TCRA1101 Automated Motorized Total Stations were used to surveying mast and Jib’s inclination. The second system is based on the elasto-acoustic phenomenon to measure the stresses in tension or compression. This second system is called the self-excited acoustical system (SAS). Results showed that SAS system could fully replace the classical strain gauge method. Stress was also measured by integrating these two parallel systems into a single or redundant system. Voisin et al. (2004) modelled a 1:80 scale tower crane model for the measurements of an overturning moment at a tower crane induced due to storm winds with two environmental conditions. First, an upwind surrounding building and second, without an upwind surrounding building were considered. Result finding suggested that the effect of gravity and wind moment were much higher than that of inertial and centrifugal moments. Nenad et al. (2008) and Nenad et al. (2011) described the failures of the counter jib of the tower crane due to stress-induced higher than allowable stress. The study was conducted in two steps. The first is to identify stresses, and in the second step, laboratory investigation of mechanical properties and chemical properties of the material. The stress region was found during the inquiry due to the combined effect of higher stress in the gusset plate and welded joints.
He Chen et al. (2019) achieved satisfactory tracking performance using the adaptive tracking control method. A closed-loop system was found asymptotically stable by using Lyapunov stability analysis. Jun et al. (2015) worked on automatically generating an optical tower crane layout plan by using the Firefly Algorithm (FA) and Building Information Modelling (BIM). Simon et al. (2013) worked on fatigue design optimization of tower crane elements using a probabilistic approach. Huimin et al. (2020) worked on the dynamic model of a tower crane in which closed-loop system stability was assessed through Lasalle’s invariance theorem and Lyapunov technique. It was confirmed that a non-linear controller depends on energy shaping. Robustness and control performance was found significant by using the non-linear controller. Doci and Lajqi, (2018) presented a modelling and simulation study of a tower crane to analyze dynamic parameters such as angular velocity, acceleration, force, and torque. MapleSim software was used to estimate the dynamics and motion in the form of a block diagram. Lengvarsky et al. (2013) did a modal analysis of cantilever beam simulation in ANSYS to identify the dynamic characteristics.
In another study, Zai et al. (2011) and oktay et al. (2017) developed FEM model for the lattice boom of a crane and validated it through experimental results. For this purpose, a 1/30 scaled physical model was fabricated. Huang et al. (2014) have used the analysis of 3D beam and bar elements employed for vertical and horizontal frames and the tie rods of the tower crane to build up the numerical model based on seismic response analysis of the tower crane. Ajinkya et al. (2014) performed a static study of axial force and deformation in the jib using ANSYS 14.5 model and validated it analytically. In dynamic analysis, acceleration, braking, and angular velocity of tower crane jib were calculated using the crane’s self-weight, including payload moving along the jib for safety and stability analysis. Gang et al. (2018) analyzed the performance in terms of the capacity of joints used in tower cranes through a scale model test and verified it by numerical simulation. A test was conducted on the embedded parts and the model was numerically simulated by the finite element method for stress analysis. The observations suggest that embedded parts undergo two types of damage pullout damage at anchors and bending fracture damage of shear walls under sufficient anchoring.
Azam et al. (2018) have carried out structural stability and optimization and observed that symmetrical shape structures are often encountered with close natural frequencies. It also resulted in dangerous and expensive failures in structures, bridges, tower cranes, and machinery to break or malfunction. Siu et al. (2019) noted that theoretically close modes often induce symmetrical structures with similar dynamic properties. The closed modes are much more challenging to identify and pose significantly higher building risks. Typically, these modes occur in horizontal or vertical axes of symmetrical structures and are more sensitive than separated mode shapes. Eihab et al. (2003) worked on a planar control effort to suppress unsafe ship-mounted crane pendulations induced by sea motions. A new crane configuration was proposed in the design using Coulomb friction and viscous damping. It was revealed that both in-plane and out-of-plane control efforts must be applied to guarantee the safe operation of a ship-mounted crane. Hussien at el. (2015) A feedback control scheme was utilized to implement a proportional-integral-derivative (PID) controller in the Gantry crane system. The main objective of PID was to control trolley displacement and the swing of the payload oscillation.
Arslan et al. (2008) carried out a root cause and failure analysis (RCFA) of a tower crane that failed due to external excitations. The main factors that led to these failures are: no regular platforms were provided on the crane foundation during crane assembly, anchorage and bracings were not used between the crane, and the extreme load at the end of the crane arm, which led to the higher bending moment. Debasis and Shreya, (2012) surveyed the risk factors involved during the tower crane operations in terms of relative weightage. The study revealed that environmental factors appear to be the most critical and affect the tower crane operations by 28.13%. Safety management was also featured as a significant risk factor with 25.82%, followed by the human factor at 23.91 % and project condition at 22.14%. Mohamed et al. (2019) performed dynamic analysis of crane subjected to turbulent wind excitation by implementing three-dimensional finite element model using MATLAB. Kenan and Azeloglu,(2021) carried out modal and transient analysis by implementing finite element method using MATLAB to obtain seismic response of tower crane. The environmental factors including wind velocity, the occurrence of the cyclone, rain, temperature, and adverse weather conditions such as low visibility due to fog are some of the risk factors affecting the tower crane’s operations.
This research article, section 2, delineates the theoretical analyses using Galerkin and Dunkerly methods used to determine the natural frequencies of the boom, mast, and tower crane under different boundary conditions. Section 3 describes the FEM procedure and its modal parameters of the boom, mast, and tower crane under similar boundary conditions used in theoretical analyses. Results and discussions were summarised in section 4 followed by a conclusion in section 5.
2. Structural Configurations of Tower Crane

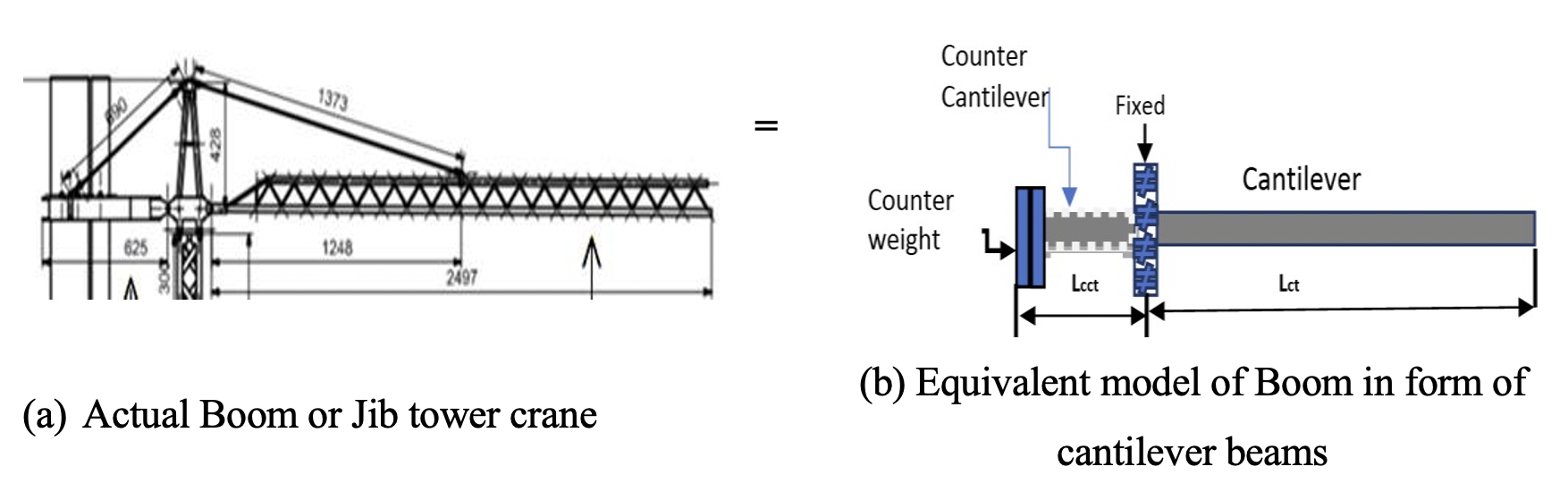
A Tower crane is an assembly of a vertical mast in the form of a column, counter jib, and horizontal boom in a cantilever beam. As shown in Fig. 1 (a), the actual tower crane model can be represented in the form of a mechanical model in Figure 1(b), consisting of a boom in the form of a cantilever and counter jib along with the weight of a mast in the form of a column.
Though the tower crane works as a single unit under operating conditions, very few components pose high risks and are venerable to external excitation due to any impending disasters. The mast and the boom are major parts of the tower crane due to their size. Because of this, modal parameters are identified for the tower crane as well as the mast and boom individually.
2.1. Mathematical Analysis Boom
Mathematically the natural frequencies of a boom may be determined by considering it in from, as shown in Fig. 2. The equivalent mass (Mct) represents the mass of the cantilever beam.

The stiffness value of the counter cantilever beam = Kcct, and the stiffness value of the cantilever beam = Kct. The combined equivalent stiffness (Kboom) of the boom in the form of a cantilever and counter beam or jig may be given as per the analogy of the springs in the series as given below.
1 Kboom =1 Kcct+1 Kct
Since overall equivalent stiffness is a function of the elastic modulus (material stiffness) and the dimensions of the beam (geometrical stiffness). Now, considering the linear relationship between the force and deflection of a cantilever beam within the elastic limit, the stiffness of the cantilever beam may be expressed as from equation (4).
Kct=[3.E.IctL3ct]
Similarly, the stiffness of the counter cantilever beam (CCB) or counter jib can be written in form of equation (5).
Kcct=[3.E.Icct L3cct]
The equation of equivalent stiffness of boom is obtained from the equation of cantilever beam (4) and counter cantilever beam or counter jib (5) connected in the form of series is given in equation (6):
1 Kboom =1 Kcct+1 Kct=1[3.E.IcctL3cct]+1[3.E.IctL3ct]=L3ct×Ict+L3cct×Ict3E[Icct×Ict]
Considering the single degree of freedom system vibrating under free vibration conditions, it is represented in equation (7) as follows:
Mboom ¨X(t)+Cboom ¨X(t)+Kboom X(t)=0
Therefore, without considering the effect of the damping, the natural frequency of the boom, whose stiffness is obtained from equation (8), is expressed as:
the natural frequency of boom, f=1√Kboom2π Mboom
The mass of the cantilever beams may be expressed in terms of density, cross-sectional area, and the length of the cantilever beams: Thus, the equivalent mass of the cantilever boom is expressed in the form of following equation:
Mboom =Mcct +Mct=ρ[AcctLcct+ActLct]
Now replace the values of Kboom in the equation of natural frequency of cantilever beam is given as
f=12π×√L3ct×Ict+L3cct×Ict3E[Icct×Ict]ρ⋅[Acct⋅Lcct+Act⋅Lct]=12π×√L3ct×Ict+L3cct×IctMboom×3E[Icct×Ict]
Further research conducted by Binghui1 found that total mass associated with the cantilever beam and the counter jib, including the counterweight mass of the vibrating system, varies from free region 0 ≤ x ≤ Lcct as well as 0 ≤ x ≤ Lcct×Lct for both beams)
=ρ[Acct×Lcct+Act×Lct]
Now, considering the harmonic motion of vibrations in the beams under free vibration conditions, a dimensionless factor “α” needs to be included in the equation of the fundamental natural frequency of the beam, such as:
√3/α2π×√L3ct×Ict+L3cct×IctMboom×3E[Icct×Ict]
In equation (12), the dimensionless factor α is assumed as a fraction of the total mass placed at the tips of the beams during the evaluation of the stiffness of these beams. Considering the practical situations in which the value of α may be suitably chosen somewhere in the range 0 < α < 1 reasonably. This straight assumption of considering the mass of the entire cantilever beam system accurately estimates the fundamental natural frequency during vibration. Further, an exact estimation of the value of the non-dimensional parameter α may be obtained mathematically. The standard equation of fundamental natural frequency corresponding to its first mode shape for vibrating uniform cantilever beam system can be expressed as:
fboom=ξ∗22π√L3ct×Ict+L3cct×IctMboom×3E[Icct×Ict]
Where, The Where the numerical value of the dimensionless parameter maybe obtained as positive roots, to the transcendental equation
The only solution of this equation occurs when though an infinite number of such values as per the Bimal.2 However, only one smallest value will occur somewhere near the cosine function first become negative, just beyond
This is the numerical/ graphical solution that provides the first value as
Now by placing the exact positive value of in the fundamental natural frequency corresponding to its first mode number, the equation can be expressed as:
fboom 1=(1.87)22π×√L3ct×Ict+L3ctt×IctMboom×3E[Icct×Ict]
The values of higher natural frequencies may be obtained using the appropriate numerical Newton-Rhapson which suggests that for mode number n ≥ 3, the value of the dimensionless parameter is to be taken as , The value of for the second, the third, and fourth natural frequencies may be obtained as 4.69 and 7.85, respectively.

For determining the numerical values of the natural frequencies of the boom, following material properties are taken: modulus of elasticity, E = 206 GPa as per the ASTM standards, moment of inertia for the boom (Ict)x= (Ict)y= 1.104x106 mm4and (Icct)x= (Icct)y = 1.99 x105 mm4, mass of the boom including counter Jib, Mboom= Mct+ Mcct=1000 kg, length of boom or jib Lct=2497 mm and Lcct= length of counter Jib= 625 mm.
Using the above geometrical and material properties, the first three natural frequencies of the boom obtained from the mathematical equations (12) and (13) are 2.54 Hz, 15.97 Hz, and 19.79 Hz, respectively.
2.2. Mathematical Analysis of Mast
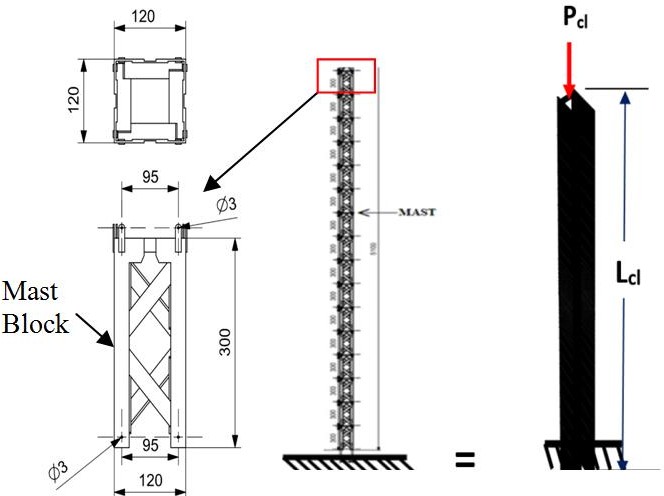
Euler’s differential equation is used to analyze the natural frequency of considering mast in the form of the column as shown in Figure 3.
Since the mast, a sub-assembly of the tower crane, resembles a column, its lateral deflections under similar boundary conditions may be given as
δ1=PclL3cl3EclIcl
If Kcl is the stiffness of the column, then
Kcl= Load deflection =Pclδ
The natural frequency of the boom may be given as
fmast =12π√3EclIclMclL3cl
Now, mass Mcl is chosen in a manner such that the frequency f1 and fe are equal, therefore on equating the equation becomes:
Now if a small element dx is taken at a distance x from the fixed point then on integration from x=0 to
Thus, the first frequency of mast in form of the column using a fixed end – the free end is given as
f1( mast )=12π√3EI(cly )MclL3cl
The moment of inertia of mast as per calculation is, (Icl)y= 1.596 × 106mm4and (Icl)x 1.750 × 106mm4, Modulus of elasticity E = 206 GPa, maximum length of the vertical mast, Lmast=300x17 = 5100 mm, mass of mast= 150 kg. The first natural frequency of mast is obtained by using (Icl)y in equation (15). For frequency corresponding to the second mode of the column, the moment of inertia Iy is replaced by the Ix in equation (15). For determining the third natural frequency, displacement of the tip of the column due to the vibration of 0.217L length may be considered the highest as per Binghui.1 Therefore, in equation (16), only a length of 0.217L is considered to calculate the third and fourth frequencies. For calculation of the third natural frequency, (Icl)y is used, and for the fourth natural frequency (Icl)x is used.
f3(mast)=12π√485.481EIyMclL4cl
Using geometrical and material properties of the mast in equations (16 - 17), the first three natural frequencies are given as: 1.12 Hz, 1.17 Hz, and 10.99 Hz.
In a tower crane assembly, the mast is one of the most prone to failures compared to other parts. Mainly, failures occur in the mast during the high speed of winds due to its height due to the excitation of mode shapes at lower natural frequencies. Therefore, it is essential to analyze the initial few modal parameters of the mast to ensure the stability of the tower crane.
2.3. Mathematical analysis of tower crane
The approximate values of natural frequencies of tower cranes under various boundary conditions are obtained using Galerkin and Dunkerly methods.
2.3.1. Galerkin method
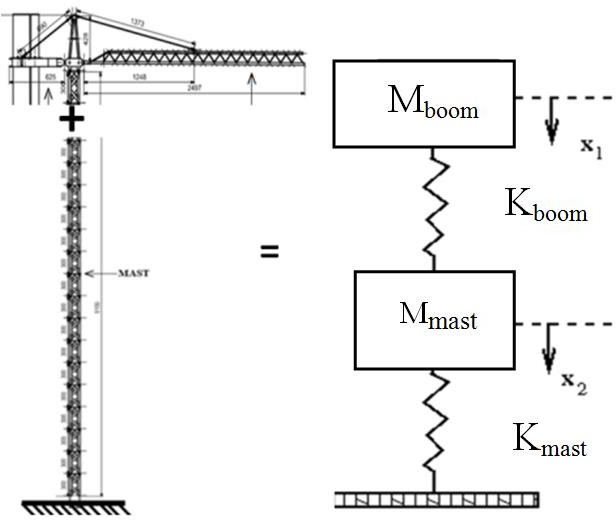
Lukasz Kloda et al. (2018) and Ding and Tianjian,(2007) attempted to find out the dynamic parameters of a tower crane assuming the form of a spring-mass-beam system, as shown in Figure 4. In this study mast and the boom of the tower crane are considered sub-systems in the form of a spring-mass -system connected in series. Using this analogy, the values of natural frequencies are estimated using the equation (20).
1f(tc)1=1fboom 1+1fmast1

2.3.2. Dunkerley’s method
Meirovitch3 derived an equation for the estimation of values of natural frequencies of the spring-mass system connected in series using Dunkerley’s method. The tower crane is assumed to be composed of a supporting column in the form of a mast and the sub-system boom in cantilever beams, as shown in Figure 4. The equivalent mass and stiffness matrix of the tower crane is given as:
[Mboom 00Mmast ] and stiffness matrix =[Kboom +K2 mast −Kmast −Kmast Kmast ]
The characteristics equation of the motion of the tower crane is given as:
|[Ks−ω2[Ms]]|=Mboom Mmast ω4−{(Kboom +Kmast )Mboom +Kmast Mboom }ω2+Kboom ×Kmast =0
And letting λ = ω2 the solution of the above quadratic equation is obtained as
λ=Kboom +Kmast 2Mboom +Kmast 2Mmast ±√(Kboom +Kmast )24(Mboom )2+K2mast 4M2mast +K2mast −Kboom ×Kmast 2Mboom Mmast
For simplification, assuming and
λ=Kboom Mboom [1+γ2+γ2ε±√ε2(1+γ)2+γ2+2εγ(γ−1)2ε]
Assuming, Now, replacing the value of χ , the numerator of the equation (20) can be written in the form of
λ=Kboom Mboom[1+γ2+γ2 s±√χ+γ22 s]
Careful observations revealed that as ε approaches zero, χ will tend to zero and the equation may be written considering χ = 0 using Taylor’s series,
√χ+γ2=γ+χ2γ
Under this condition, equation (xx) may be written as:
λ=Kboom Mboom [1+γ2+γ2ε±{γ2ε+ε(1+γ)24γ+γ−12}]
The solutions of the above equation become
λ1=Kboom Mboom [1−ε(1+γ)24γ] and λ2=Kboom Mboom [γ+γε+ε(1+γ)24γ]
Considering the term is very small compared to the other terms, above equation approaches in the forms as
λ1=Kboom Mboom and λ2=Kboom Mboom ∣γ+γs=Kmast Mboom +Kmast Mmast
The above equations are applicable within a narrow range of values of ε and γ. Precisely, ε should be less and γ should not be too small or very large. It means that Mmast should be small Mboom, whereas similar values of Kmast and Kboom are desirable. Using the above assumption, the natural frequencies of the tower crane may be given as
ω1=√Kboom Mboom and ω2=√Kmast Mboom+Kmast Mmast =
To obtain the more precise values of the natural frequencies of any structure having n number of degrees of freedom, Dunkerley’s formula may be applied
1ω21=α1Mboom +α2Mmast +α3Mcounterjib +⋯+αiMsub-system
Where
Jianhua, Ji, and Gun-Myung Lee4,5 generalized Dunkerley’s equation for determining the natural frequencies of systems consisting of sub-systems. This equation is modified for the tower crane (ftc) and is given as:
Kmasts −Mmast ×ω2mast =ω2ct 1−(ωct/ωboom )2×Mboom
Where,
Mass of mast = Mmast = 150 kg, and Mboom= 1000 kg, all three values of natural frequencies offmast and fboom are taken from sections 2.1 and 2.2, respectively. Further, considering only the mast and the boom as the major parts without considering the other sub-systems such as metallic tension cables, bracings, etc. in the tower crane. The equation of the tower crane is simplified as:
1f(tc)=√1(fboom )2+1(fmast)2
Where fct is the frequency of the tower crane, fboom is the frequency of boom and fmast is the frequency of mast. The individual value of the natural frequency of the boom and mast is used to estimate the natural frequencies (fct) of the tower crane under various boundary conditions are summarised in Table 1.
Observations of Table 1 revealed that natural frequencies of the tower crane in both methods increase with an increase in the number of bracings on the mast. It is confirmed that the highest values of the natural frequency of tower cranes are obtained under the fifth boundary (BC-5). It is the testimony that under any impending cyclones, the tower crane will be in the highest possible structural stability. The probability of failure will be minimal under this boundary condition (BC-5). The above-described theoretical values of natural frequencies for the boom, mast, and tower crane under all five boundary conditions are also verified through modal analysis in FEM.
3. Modal Analysis of Tower Crane using ANSYS
The Tower crane has two major parts: the boom and the mast. It is the usual expectation that a tower crane unit must be in stable condition during operations and at the time of natural calamities. Initiation of instability can lead to a collapse of the complete tower crane due to tuning the first few natural frequencies between boom and mast with the whole unit. Therefore, identifying the natural frequencies of each part is essential as stability is a concern. For this, the 3D models of the boom, mast, and tower crane unit are modeled in Nx-Unigraphics and then imported into the ANSYS Workbench-19R1 individually for the modal analysis. A 3-dimensional model of the structure was meshed using the automatic mesh generation option by opting for free meshing. This mesh option mainly uses triangular and tetrahedral (SOLID 187) elements in the workbench platform. It uses fault-tolerant philosophy in which at least 12 problems in the mesh itself get resolved. If the mesh fails higher than 12 times, the mesher is termed failed. In this study, all the models meshed successfully. Isotropic material properties such as Young’s modulus, density, Poisson’s ratio, damping coefficient, and linearity were defined manually during simulations. Both in the workbench and ANSYS Parametric Design Language (APDL), the Black Lanczos method was applied to determine the first few Eigen-values and Eigen-vectors. The boundary conditions are selected similarly to the working conditions for the boom, mast, and tower crane.
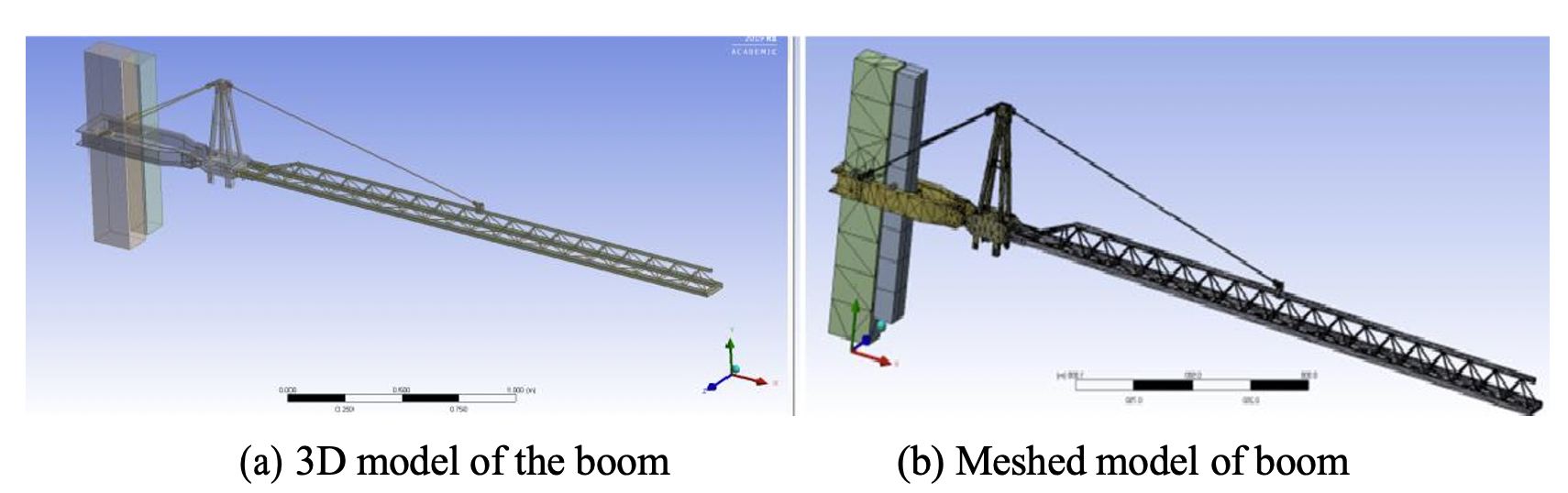
3.1. Modal analysis of the boom
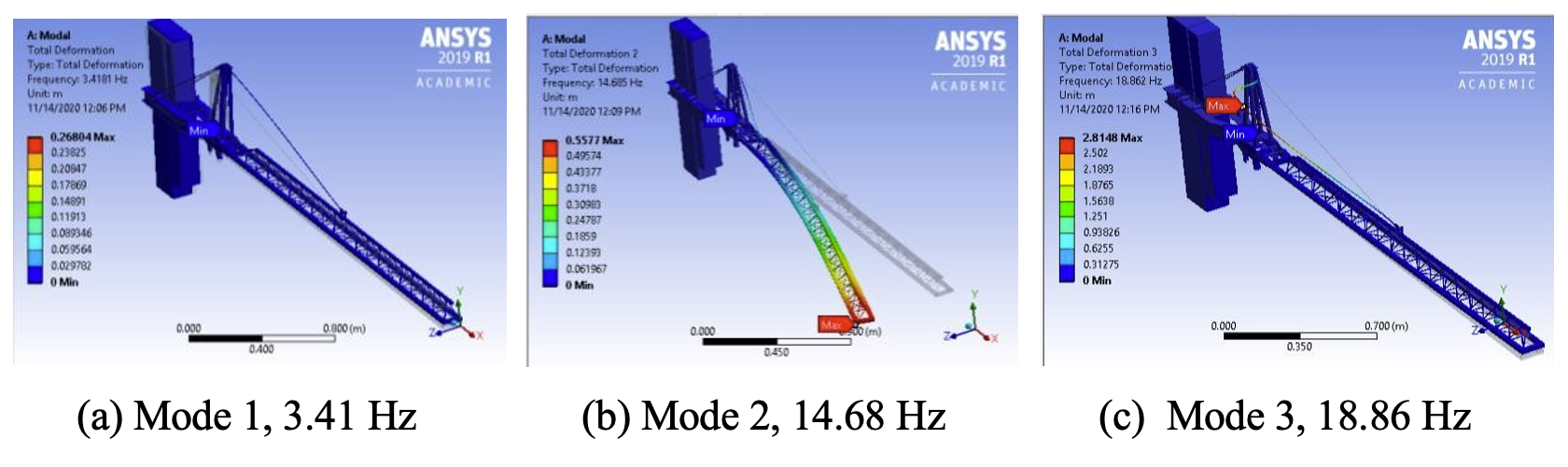
The boom is a very critical part of the tower crane as it is used to carry the construction materials from the ground to the under-construction floors as shown in Figure 5. The boom is considered under this investigation has a jib length: 2497 mm, counter jib length: 625mm, a total counterweight: 500kg, and, assuming the construction material is structural steel. This part is usually subjected to high bending and deflection due to its geometrical configuration and loading. It is clamped at its mid-span to the mast with metallic wire cables to avoid excessive bending and deflection.

Output results can be further refined by increasing the number of elements and decreasing the size of each element during meshing, also known as convergence study in the workbench. However, the use of coarse mesh was sufficient to assess global behavior in the structure through modal analysis. The obtained results in terms of modal parameters of this analysis are shown in Figure 6.

Observations of Figure 6 revealed that the bending effect induced along the y-axis toward the ground in Mode 1 at the frequency of 3.41 Hz. It happens to boom as it is constantly subjected to the gravitational force due to its self-weight. Mode 2 shows a bending effect corresponding to its 14.68 Hz boom in the z-direction. Mode3 shows bending in the cable corresponding to the natural frequency of 18.86 Hz.
3.2. Modal analysis of mast
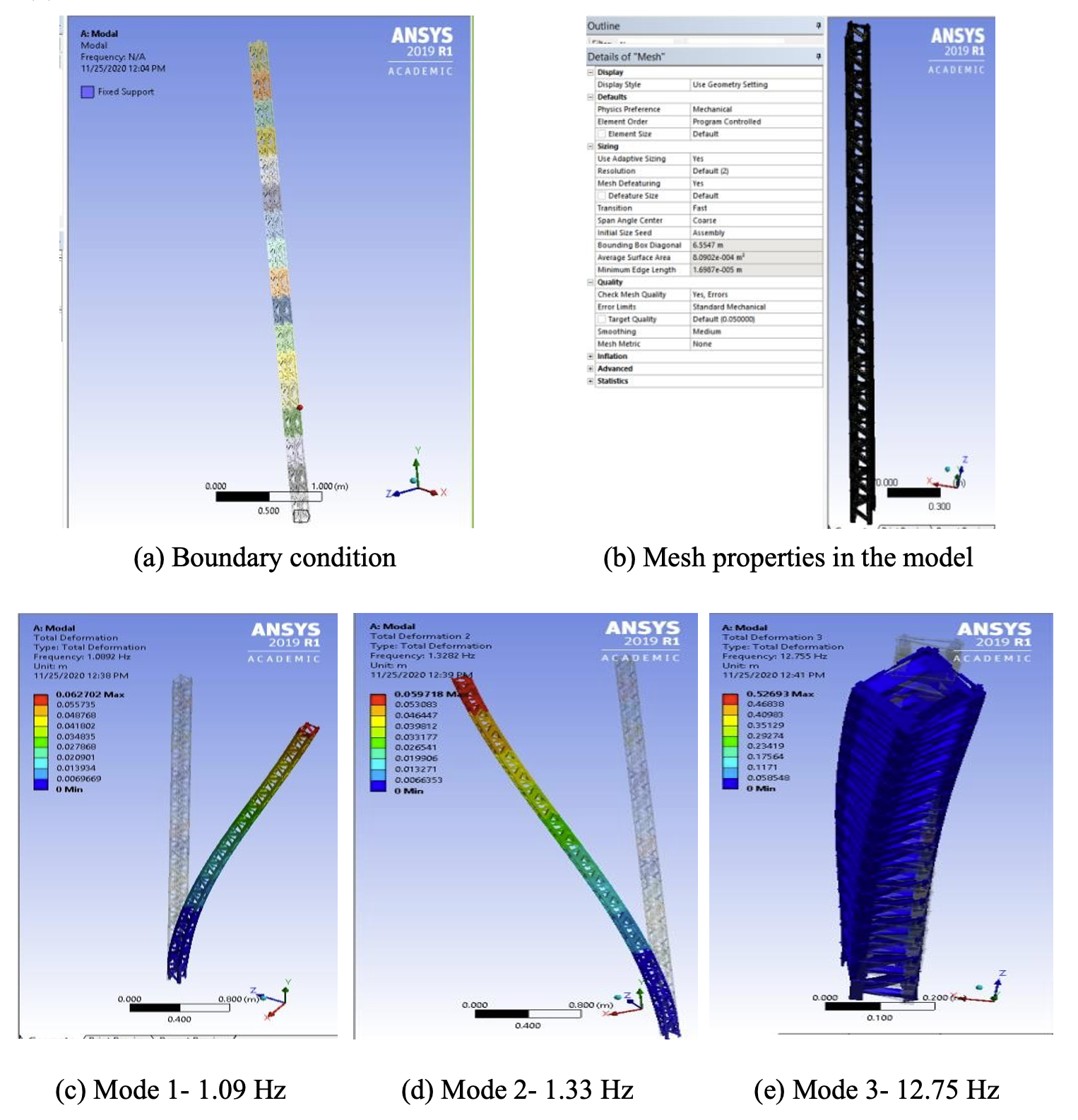
The mast is the backbone of the tower crane. It is subjected to a very heavy load vertically and prone to buckling due to its huge vertical length, which may further aggravate during any natural calamities. The tower crane’s structural part, designed and assembled in Nx-Unigraphics software, is the 1/10th scale model using blocks 17. Each mast block length is 300 mm. Modal analyses were conducted using fixed end-free end boundary conditions (Figure 7 (a)). The meshing was done by selecting automatic options element size, refinement at angles, and type of elements chosen from drop-down options available in software, as shown in Figure 7 (b).

The observations of the mode shapes in Figure 7, modes 1 and 2 are closed modes and induce bending moments at the ground corresponding to their natural frequencies of 1.09 Hz and 1.32 Hz, respectively. The close modes are usually seen in symmetrical structures and occur at a tiny difference in natural frequencies as seen in this study. Mode 3 revealed the torsion effect with a maximum angular deflection on the free end of the mast at a frequency of 12.75 Hz. This mode may be considered very sensitive in the tower crane as a slight change in angular
deflection can significantly swing the boom and the load it carries. In the assembly of a tower crane, it is essential to ensure that no tuning effect is induced due to coinciding natural frequencies between the boom and mast of the tower crane to avoid any failures.
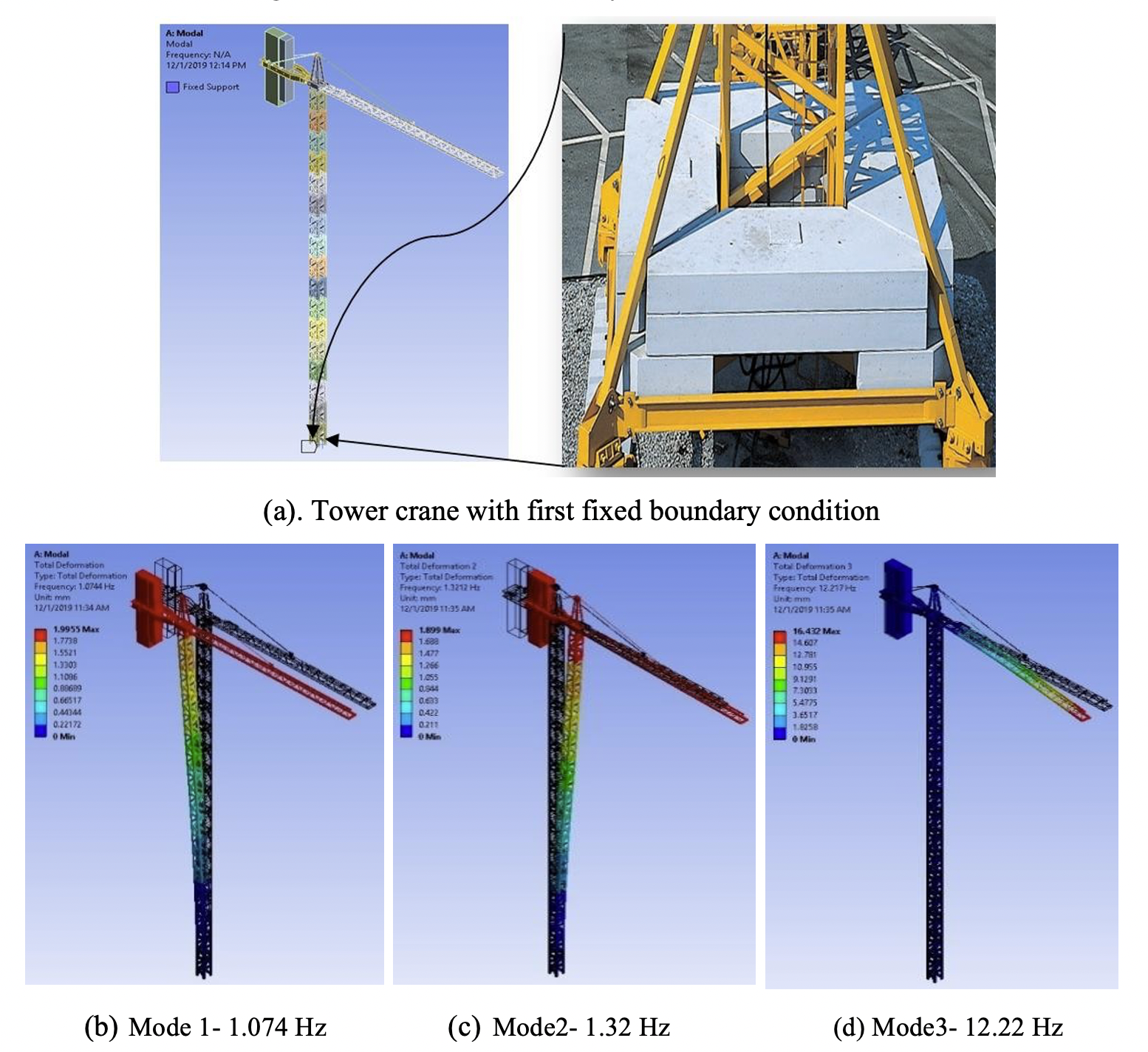
3.3. Tower crane with first boundary condition (BC-1)
The first boundary condition of the tower crane is fixed at the ground and free on the other end without any bracing and its mast height. Practically, this type of boundary condition is suitable for small heights within 10-15 meters only in the tower crane.
The observation of the mode shapes in Figure 8 revealed that Mode 1 and Mode 2 are inducing bending effects in mast corresponding to their natural frequency of 1.09 Hz and 1.32Hz, respectively. These modes may be considered close modes due to their narrow differences in frequency of occurrences, which generally happens in symmetrical structures. Mode 3 illustrated a bending effect in boom and a metallic cable at a natural frequency of 12.22 Hz.

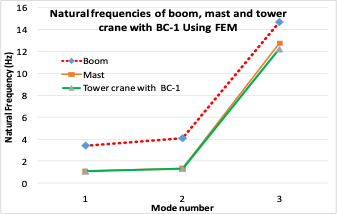
Figure 9 confirmed marginal differences in the first three natural frequencies of the mast and the tower crane with the first BC-1. This is a sign of probable tuning of natural frequencies between the mast and the tower crane, though the latter is on a higher side.

Under this condition, the tower crane is likely to fail if subjected to any external excitation caused by cyclones. This is undoubtedly an unstable condition and needs to be rectified through the decoupling analysis in which values of natural frequencies between the mast and tower crane are separated. The detuning of natural frequencies in structural parts could be achieved by changing geometries, construction material, and boundary conditions. However, the easiest way of detuning is to modify the boundary conditions without going through design modifications. It involves only minimum resources and time consumption in installing the bracings on the mast vertically to enhance stability.
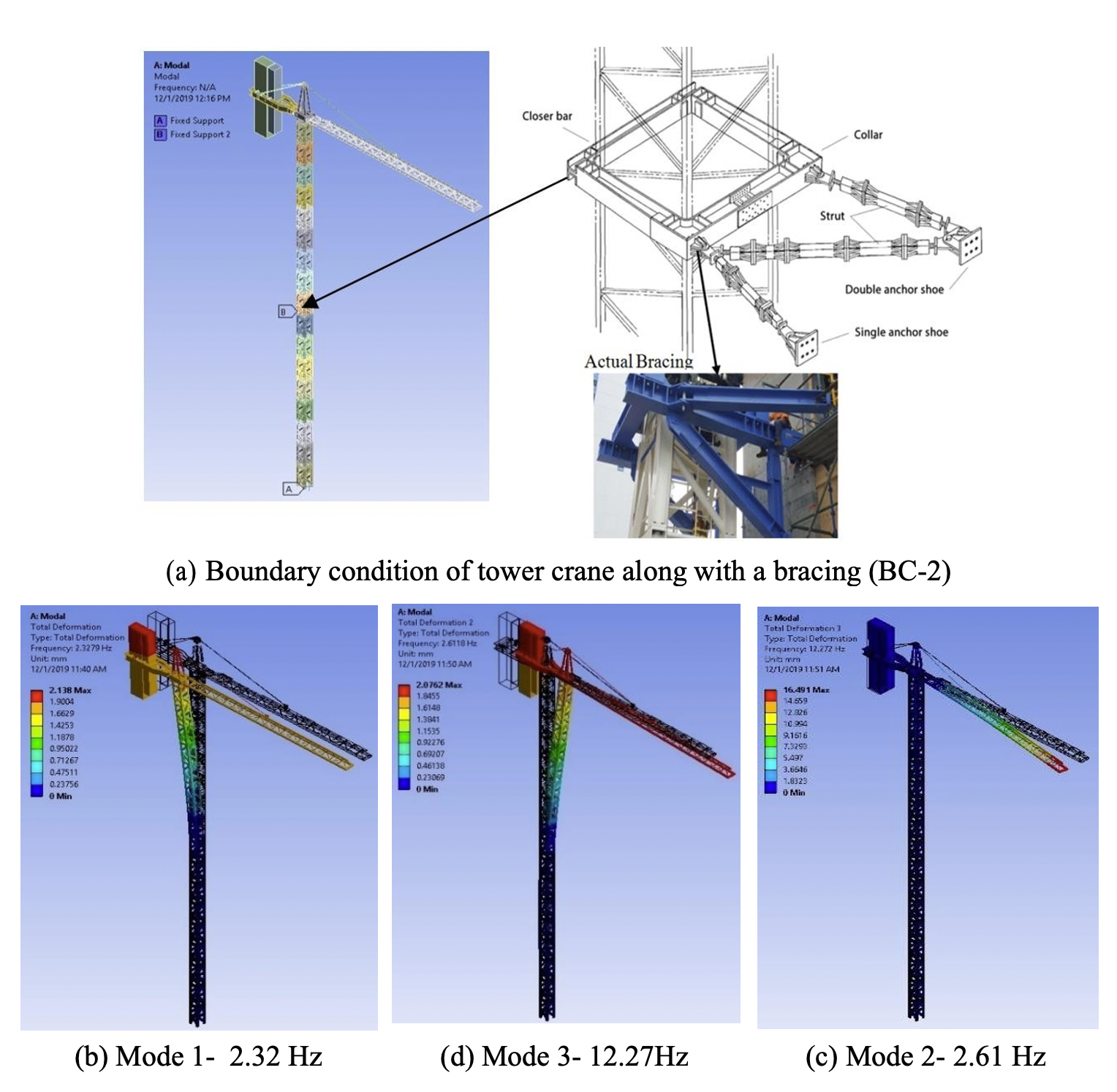
3.4. Tower crane with second boundary condition (BC-2)
In this type of boundary condition, the tower crane’s mast was fixed at the ground, and at 4th, the block of the mast (240 cm from the ground) with a bracing as shown in Figure 10 (a). It clamped to the building under constrictions itself. Practically, this type of boundary condition is implemented to enhance the tower crane’s stability as the mast height increases. This bracing is employed if the tower crane’s height is between 15-25 meters only.

The mode shapes of the tower crane with one bracing are given in Figure 10. Even after fixing the mast with one bracing, mode shapes 1 and 2 are close modes and show bending effects corresponding to their relative natural frequencies of 2.32 Hz and 2.61 Hz. Mode 3 shows the bending impact on the boom with a torsional effect along the y-axis at the natural frequency of 12.27 Hz. The above mode shapes again confirmed that mode shapes do not change with the addition of bracing on the mast. However, the stability increases due to an increase in stiffness of the mast as conformed in terms of rising values of natural frequencies.
3.5. Tower crane with third boundary condition (BC-3)
In this boundary condition, the tower crane is fixed at the ground and set at 1stat 150 cm & 2nd at 300 cm by bracings on the mast as shown in Figure 11 (a). Practically, this type of boundary condition is suitable in tower cranes if the height varies from 25 to 35 meters.

The mode shapes of the tower crane fixed at the ground, and its two bracings have also shown exactly similar mode shapes as discussed in sections 3.3 and 3.4 as shown in Figure 11. However, due to the addition of the bracing, in this case, the natural frequencies of the tower crane are increased. This is an indication rise in the stability of the tower crane due to an increase in stiffness. This is expected as the effective height of the mast in the tower crane is reduced.
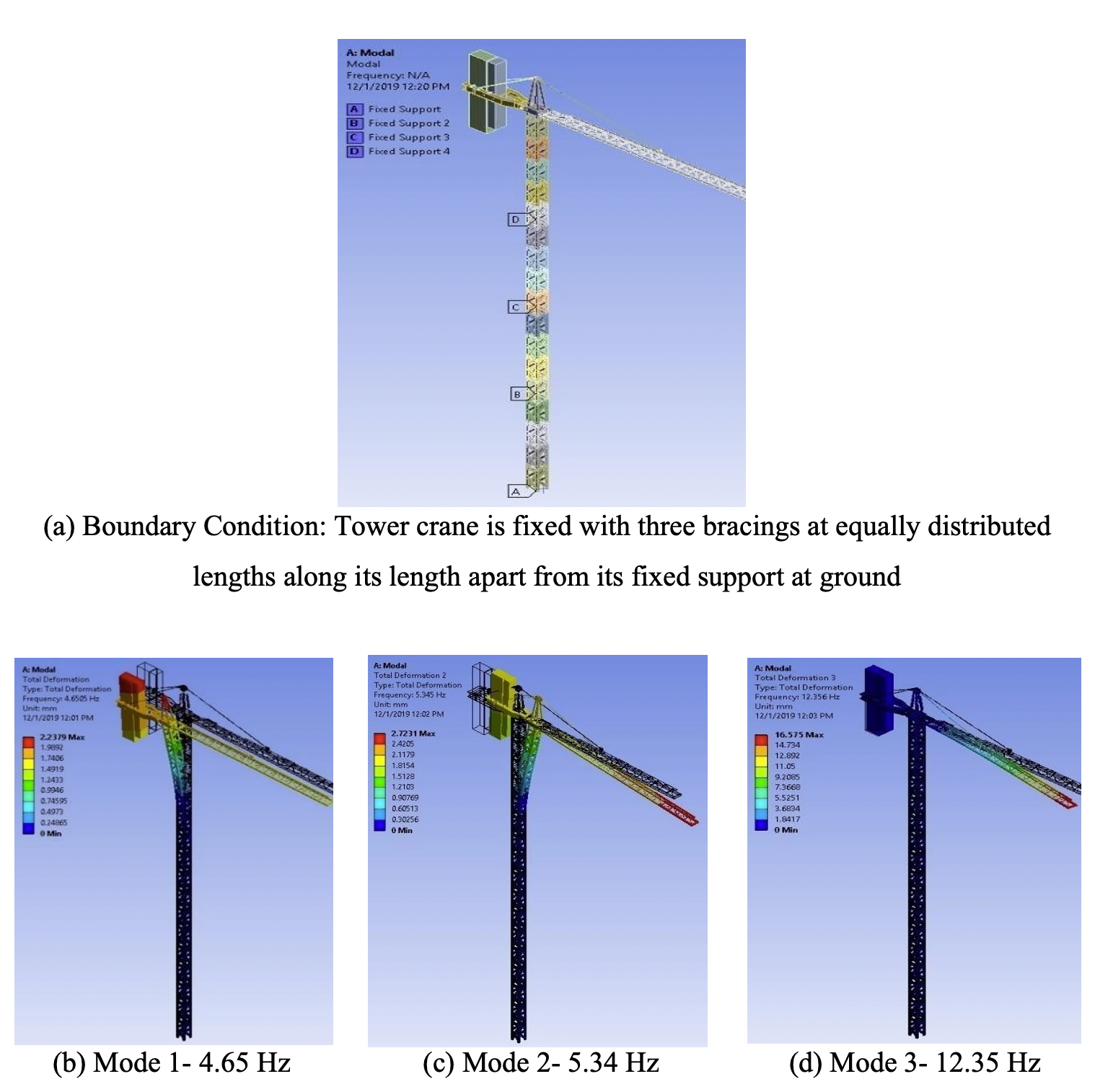
3.6. Tower crane with fourth boundary condition (BC-4)
In this boundary condition, a tower crane’s mast is fixed with three bracings (1st at 120 cm, 2nd at 240 cm & 3rd at 360cm from ground) apart from the ground fixed support. If the height of the tower crane is above 40 meters, it is always advisable to have such kind of multiple bracings set under constriction building. The additions of bracings to the mast ensure the
stability of the tower crane and control the vibration level within permissible limits during operations. The modal parameters of the tower crane with three bracings apart from its fixed supports are shown in Figure 12.

As shown in Figure 12, the observations of modal parameters confirmed that due to an increase in the number of bracings along the mast, natural frequencies of all the modes also increase with marginal changes in deflection of the mode shapes. Further, a novel idea is proposed in section 4.5 to enhance the stability up to a maximum level to ensure that the tower crane of any height remains stable even during any impending natural calamity.
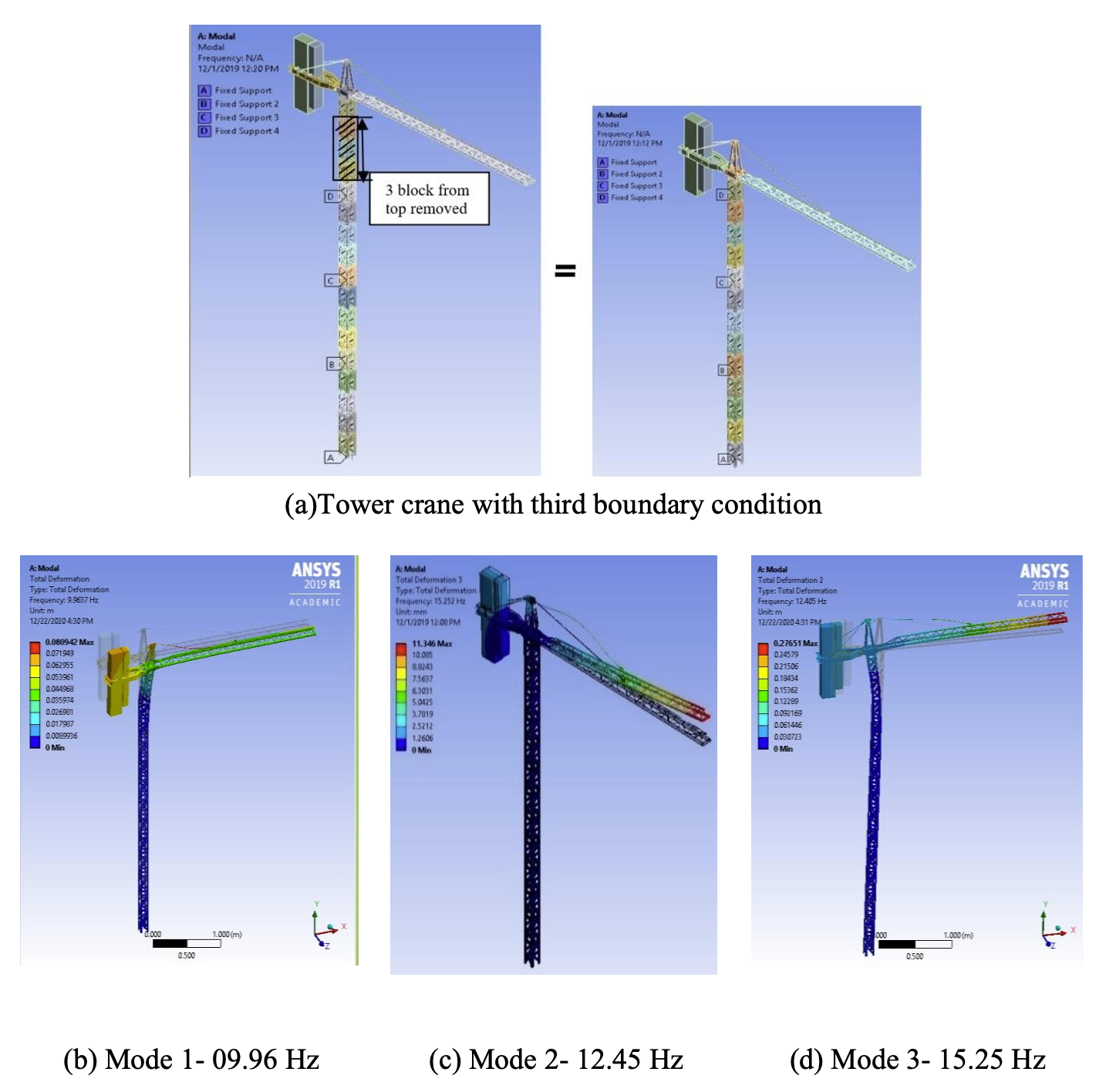
3.7. Tower crane with fifth boundary condition (BC-5)
In this boundary condition of the tower crane, the mast is assembled with 13 mast blocks and three bracings (1st at 120 cm, 2ndat 240 cm & 3rd at 360 cm from ground support up to the operator’s cabin. the effective length of mast now become Lcl= 5100 -3600- 4 x300= 300 mm only. In extraordinary situations such as cyclones, to safeguard the tower crane, BC-5 boundary condition in which the four blocks of the mast are removed deliberately from the top of the mast. This idea may be implemented explicitly during impending disasters to strengthen the mast by reducing its height from the top nearest to the bracing. It is the best way to lock the tower crane through bracings clamped to the building itself to ensure safety during any impending natural disaster such as a tornado in which airspeed reaches up to 160 to 180 km/hr. This type of un-precedent situation is usually monitored and tracked well by using real-time data received from the metrological department of every country with the help of satellites. Information regarding the cyclone is usually telecasted 24 hr or even earlier based on the severity. Under such natural calamity, the stability of the tower crane can be enhanced by reducing the height of the crane by removing the vertical mast height up-to to the nearest bracing. This is a preventive measure that needs to be taken to lock the vertical column of the tower crane completely. Though, it will require one or two hours of effort from the operator to remove the masts above the nearest bracing clamped to the building. In this novel approach, four-mast blocks are removed from the top of the mast to reduce mast height to the nearest bracing from the operator’s cabin, as shown in Fig. 13 (a).

The observations of the modal parameters revealed significant bending moments in both masts and their influence on boom in the first and second modes. The natural frequencies are found to increase from 4.65 Hz to 09.96 Hz in Mode 1 and 5.345 Hz to 12.45Hz in Mode 2. Similarly, the third mode showed the torsion effect in boom and steel wire cable corresponding to its natural frequency of 13.04 Hz.
4. Result and Discussions
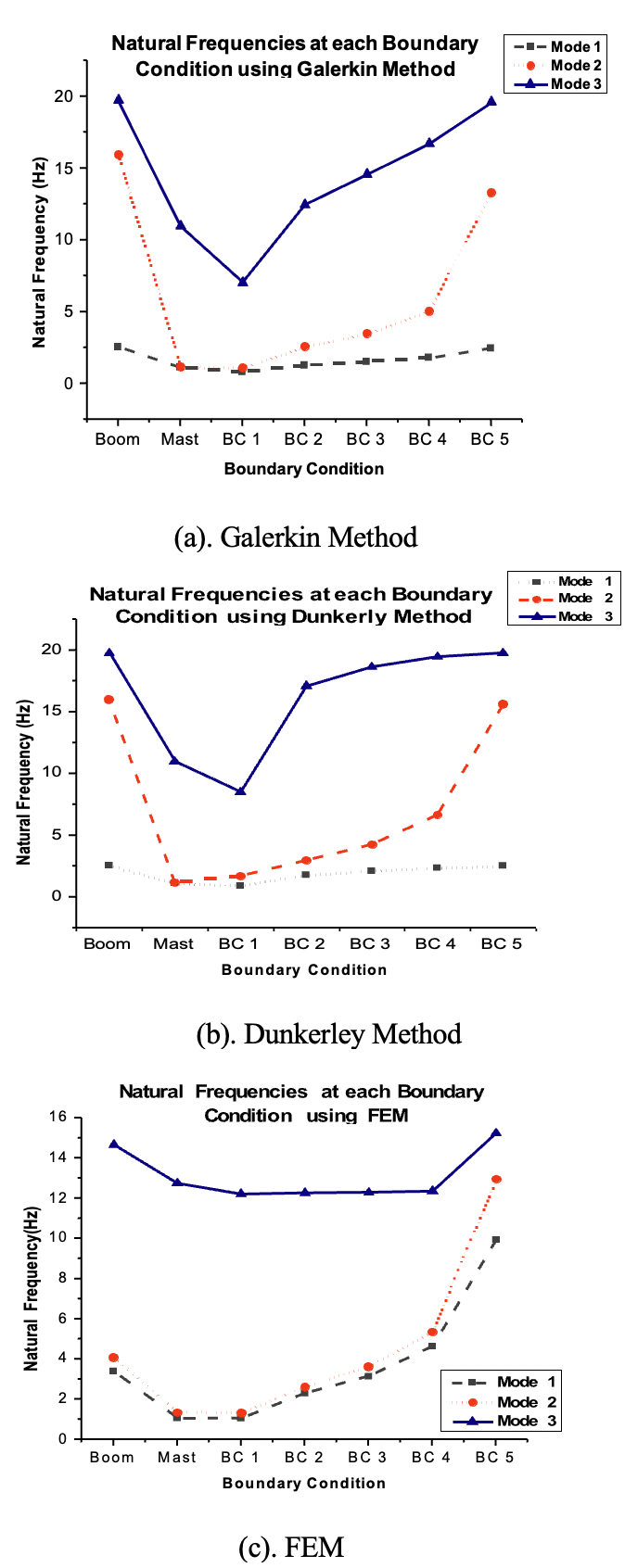
The natural frequencies of the boom and mast and the tower crane concerning their boundary conditions obtained from all three methods are shown in Figure 14. The comparative study confirmed that the natural frequencies increase with increasing boundary conditions, as shown in Figure 14. It signifies that the addition of bracing on the mast of a tower crane helps enhance its rigidity and stability which reduced the probability of failure under excitations caused by any natural calamity. This study showed remarkable similarities between values of natural frequencies of tower cranes under various boundary conditions obtained from Galerkin and Dunerley methods; however, there are slight differences with the values of natural frequencies of FEM in BC-1. Observation revealed that the lowest values of the natural frequencies are obtained in the tower crane with BC-1 compared to that of mast and boom.

Figure 14 also revealed the highest values of natural frequencies obtained in boom compared to the mast and the tower crane with BC-1. It is expected as the boom is usually fixed rigidly with metallic cables at its mid-point, smaller than the mast and the tower crane. The values of natural frequencies of tower cranes with BC-2 higher than the mat and the tower crane with BC-1 and problems of tuning frequencies of sub-assemblies are also marginalized.
Though natural frequencies of tower cranes with BC-3 increased, this situation may lead to tuning frequencies between the boom and the tower crane. Under this boundary condition, the tower crane may be destabilized under operations, and the probability of crane instability may be further aggravated under external excitations. Therefore, to decouple these values, additional bracings on the mast need to be applied for the detuning of natural frequencies between sub-assemblies and their assembly.
A comparison of natural frequencies of the boom, mast, and tower crane with BC-4 revealed that values of natural frequencies of the boom are on the higher side compared to the tower crane and the mast. The mast values are observed on the lower side, which is expected as it is the longest part in the tower crane assembly without any bracing resulting in overall lower stiffness. The tower crane with BC-4, which is fixed with three bracings, may be considered safe and stable during operations.
The comparative study of natural frequencies of tower cranes with BC-5, mast, and the boom confirmed that the stability of tower cranes increased, and the tuning effect was also marginalized due to a rise in natural frequencies by a considerable margin. This is a powerful technique and may be successfully implemented in the tower crane for enhancing its overall stability.
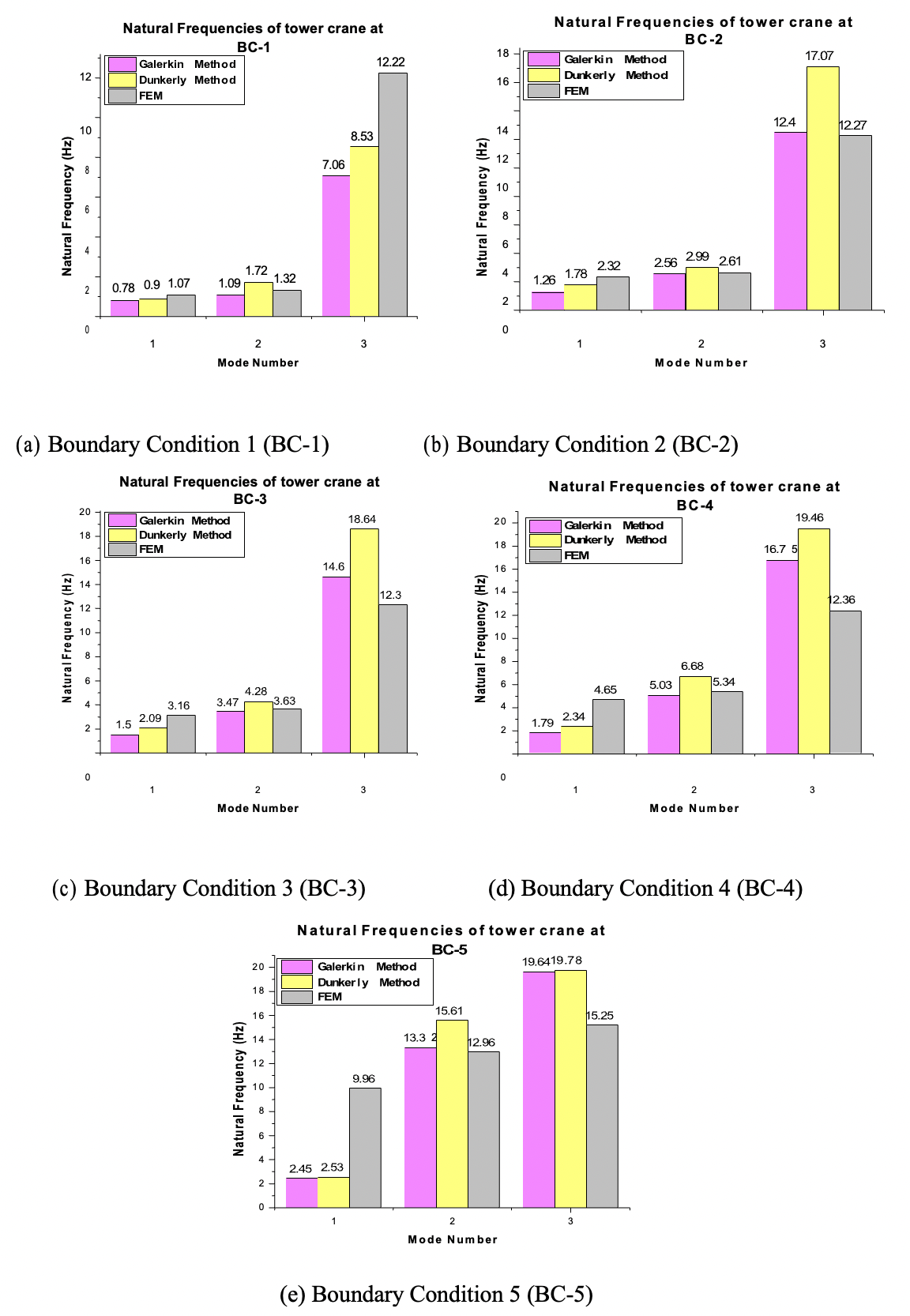
The values of natural frequencies of tower cranes obtained from Galerkin, Dunkerly, and FEM methods for each boundary condition are compared in Figure 15 for individual boundary conditions. This study confirmed similar trends of increase in natural frequencies with additions of bracings onto the mast of a tower crane.

Though values of natural frequencies of theoretical and FEM are deviated explicitly in Mode 1compared to Dukerley and Galerkin methods, as shown in Figure 15 (e). This may be attributed due to the approximation of the material properties and consideration of the scale 1/10 model. Another source of errors may be due to concerns of only two significant sub-assemblies in the tower crane and neglecting the effect of the metallic wire cable fastened in the boom. However, these type errors may be marginalized if the actual model was investigated under more extensive geometrical configurations, including the effect of the metallic cable of the boom in the mathematical equations.
5. Conclusion
The study confirmed that the stability of the tower crane increases with an increase in the number of bracings. The study also revealed that the natural frequencies could be kept from coinciding with their parts using bracings. Theoretical analyses based on Galerkin, Dunkerly, and the FEM methods show similar trends of rising in natural frequencies in each boundary condition, which confirms the increase in the stability of the tower crane. A novel idea was proposed to avoid catastrophic failures due to impending cyclones in BC-5. Bracings are applied up to the operator’s cabin and remove a few mast blocks from the top to achieve the highest stability and reduce the probability of failures under external excitations. It is an easy and quick technique that requires only a few hours of effort to implement after a cyclone’s forecast. In the current study, theoretical values of natural frequencies of the tower crane show some deviations from that of FEM results. It may be due to neglecting the other parts of the tower crane, and variation in the moment of inertia.
Declaration of Conflict of Interest
The authors declare that there is no conflict of interest.