1. Introduction
Large electric power networks with extensive geographic coverage, many generators, loads, and interconnection links are characterized by extremely complicated structures. Both static and dynamic complexity might be considered in this context.1 Adding to the complexity of these systems is the inclusion of some renewable energy sources like wind and photovoltaic.2,3 As a result, the power system needs some flexibility to operate through some controllable devices. Among these devices, Flexible AC transmission systems (FACTS). These FACTS devices are useful and crucial for enhancing the efficiency of power systems These devices can be categorized as shunt compensators like SVC and STATCOM,4,5 series compensators like SSSC6 and DVR,7 or mixed compensators like the unified power flow controller (UPFC).8–10 This categorizing is based on how they link to the power supply. The most effective FACTS device that has combine the feature of the series and shunt compensators is UPFC.
The implementation of UPFC models in power flow is a controlled power flow problem. The UPFC has control over all the parameters affecting power flow on the transmission line. UPFC is capable of controlling the real and reactive power on the transmission line and the bus voltage simultaneously and independently. It can provide the unique functional capability of independently controlling both the real and reactive power flow in the line, these capabilities make the unified power flow controller the most powerful device presently available for transmission system control.11,12 The UPFC, which was proposed by L.Gyugyi,13–15 is one of the most complex FACTS devices in a power system today. It is primarily used for independent control of real and reactive power in transmission lines for a flexible, reliable, economic operation and loading of the power system. A.M. Sharaf and M.S.Elmorsy16 presented a dynamic controller for STATCOM to stabilize Wind Energy. D.Arabkhaburi, A.Kazemi, M.Yari, and J.Aghaei17 presented an optimal placement of UPFC in power systems using Genetic algorithm. Y. Xiao et al18 used an approach to steady-state power flow control of flexible ac transmission systems (FACTS) device-equipped power systems.
The linearized model of the power network including UPFC is useful for small-signal analysis and damping controller design. The UPFC linearized model can be found in.19,20 J. B. Choo et al.21 presented an electromagnetic transmitted simulation model of UPFC, and applied this model to analyze the effectiveness of its operation in the power system. T. Orfanogianni and R. Bacher22 described the steady-state flexible ac transmission ac transmission systems (FACTS) models and their integration in an optimal power flow. A. Arsoy et al.23 discussed the incorporation of superconducting magnetic energy storage (SMES) coil into a voltage source converter based static synchronous compensator in damping dynamic oscillations in power systems.
The UPFC dynamic model knowns as a fundamental frequency model can be found in.24 This model consists of two voltage sources, one connected in shunt, and the other one in series with the power network to represent the shunt and series voltage source converters, both voltage sources are modeled to inject voltage of fundamental power system frequency only. The UPFC basic control design involves control of real and reactive power flow, sending bus voltage magnitude and DC voltage magnitude is proposed by K.E. Schoder.25 J. Yong Liu et al.26 proposed a power injection model (PIM) based UPFC control approach to consider several internal limits imposed on the UPFC, including series injection voltage magnitude, line current through the series converter, real power transfer between the shunt converter and the series converter, shunt control side current and shunt injection voltage magnitude.
H. Cai et al27 was investigated the power transfer capacity for systems with a unified power flow controller (UPFC). They studied the effects of equipment constraints, system topology and installation locations on the UPFC real power transfer. L. Dong et al.28 presented the schematic and basic controls of a reconfigurable FACTS system that can be used to realize the major voltage-source converter.
All controllers in references above are PI-type, they are designed for a specific operating condition using a linearized model. However, changes in operating conditions may have a negative effect on the controller performance. PI controllers were presented extensively to control some FACTS devices in modern power systems. STATCOM was presented to regulate the integration of two renewable sources, PV and WECS to the grid through optimal PI controllers.29 Another adaption of STATCOM that was controlled by PI controllers to mitigate the ferorreonanace of WECS was investigated in.30 UPFC was presented for improving the integration of wind energy systems to the grid as in.31 Fractional order PI controller as a modification for the classical PI controller was presented for many FACTS devices as in32,33
More advanced control schemes such as variable structure control, sliding mode control; offer better dynamic performance than conventional controllers. A variable structure control for a unified power flow control is proposed in this paper. Variable structure system control (VSSC) is attractive because it covers a wide range of operating conditions and is simple to implement.
In this paper, four representative cases have been selected, the first three cases show the UPFC independently controlling the line active power “P”, the reactive power “Q”, the line impedance “x”. The fourth case is for the UPFC to maintain a constant voltage. In all cases, the UPFC is operating with the shunt inverter (STATCOM), and the series inverter (SSSC).
2. System Description
2.1. UPFC CONTROL MODE
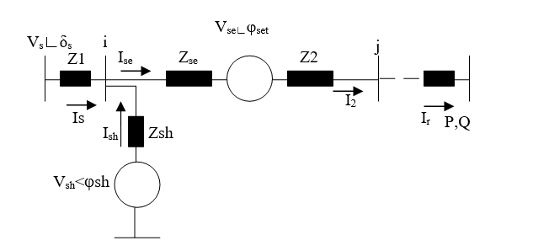
The power transmitted over an ac transmission line is a function of the line impedance, the magnitude of the sending-end and the receiving-end voltages, and the phase angle between these voltages. The unified power flow controller (UPFC) was devised for the real-time control and dynamic compensation of the transmission systems, providing multi-functional flexibility required to solve many of the problems facing the demand power as shown in Fig.1.

The control system has two main parts, the series inverter controller and the shunt inverter controller.32,33,34-36,42-49 The operation of each control is mainly dependent on the UPFC mode of operation. In this investigation, the series inverter is controlled to operate in automatic power flow mode, and the shunt inverter is operated in an automatic voltage control mode. In reactive power flow control mode, the shunt converter translates the reactive power reference into a required shunt current and adjusts the signal gate of the converter to establish the desired current. The control uses current feedback signals obtained from the output shunt current to enforce the current reference, the feedback signal representing the dc bus voltage is used to ensure the dc-link voltage. In voltage control mode, the shunt converter reactive current is automatically regulated to maintain the transmission line voltage to a reference value. The automatic voltage control uses voltage feedback signals, representing the magnitude of the bus voltage.
2.2. SHUNT and SERIES CONVERTER MODES
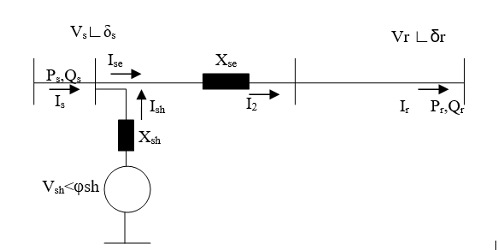
The inverter is operated to absorb or generate the reactive power from the ac system, in addition, it provides the real power demand of the series inverter. The shunt inverter modes of the operation are dependent on the required value used to derive the magnitude and the phase angle of the inverter output voltage as shown in Fig.2.

It is considered as a terminal voltage regulation as the transformer tap-changer which having infinitely steps. Where the injected shunt voltage in-phase or anti-phase with the bus voltage.14,20,24,25 Where
is the sending-end Voltage
Vsd is the sending end voltage in d-axis
Vsq is the sending end voltage in q-axis
is the current injection
is the receiving-end Voltage
δ = δs - δr is the difference angle
Xsh is the shunt reactance
is the shunt current injection
is the STATCOM Voltage
Vrd is the receiving end voltage in d-axis
Vrq is the receiving end voltage in q-axis
At the sending-end bus, the power is given by
Ss=Vs∗(Is−Ish)∗=(Vs−d+JVs−q)∗(Is−d+JIs−q)−(Ish−d+JIsh−q))∗
Then, the active and reactive power at the sending-bus “s” is given by:
Ps=Vs−d(Is−d−Ish−d)+Vs−q(Is−q−Ish−q)Qs=Vs−q(Is−d−Ish−d)−Vs−d(Is−q−Ish−q)
So, the power injected by the shunt converter is given by:
Ssh=Vsh∗I∗sh=(Vsh−d+JVsh−q)∗(Ish−d+JIsh−q)∗
Finally, the active and reactive power injected by the shunt converter is given by:
Psh=Vsh−dIsh−d+Vsh−qIsh−qQsh=Vsh−qIsh−d−Vsh−dIsh−q
However, the terminal voltage is given by:
Vs=Vsh−JXshIsh(Vs−d+JVs−q)=(Vsh+JVsh)−JXsh(Ish−d+JIsh−q)
The in-phase and the quadrature shunt voltages are:
Vsh−d=Vs−d−XshIsh−qVsh−q=Vs−q+XshIsh−d
If the reactive current is zero " Ish-q= 0"
Vsh-d=Vs−d
Therefore, the quadrature shunt voltage provide an adequate reactive power to maintain the terminal magnitude bus voltage at the desired value.
For the Shunt voltage control mode, the converter output voltage (Vsh) may be split into two components (Vsh-d and Vsh-q) with respect to the a.c. system bus voltage at which the UPFC is connected. The in-phase bus voltage component may be used to control the system bus voltage. The quadrature voltage component allows the shunt inverter to exchange the real power with the a.c. system which is required for the series inverter.
In the Reactive power mode, the converter output voltage may be divided into two perpendicular components. The in-phase voltage component will allow the shunt inverter to exchange the real power with the d.c. link and the quadrature voltage component is responsible for the exchange of the reactive power with the a.c. system, this in turn supports the reactive power in the transmission system irrespective of the variation of the bus voltage.
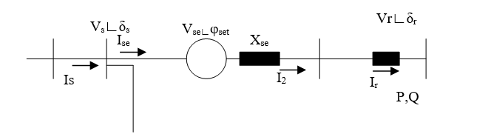
In series converter the operation is divided into different modes, these modes dependent on the required value used to derive the magnitude and the phase angle of the injected voltage. The reference signals are the line current and the system bus voltage as shown in Fig.3.

Where
is the SSSC Voltage
Xse is the series reactance
is the series current injection
Vsed is the series end voltage in d-axis
Vseq is the series end voltage in q-axis
The injected power by the series converter is given by:
Sse=Vse⋅I∗se=(Vse−d+JVse−q)⋅(Ise−d+JIse−q)∗
The active and reactive power injected by the series converter is given by:
Pse=(Vr−d−Vse−d)Ise−d−Vse−qIse−qQs=(−Vr−q−Vse−q)Is−d+Vr−qIse−q
To control the power flow towards the receiving the receiving-end bus, we have:
Sr=Vr⋅I∗se=(Vr−d+JVr−q)⋅(Ise−d+JIse−q)∗
The active and reactive power injected (Vr-q= 0) by the series converter is given by:
Pr=Vr−dIse−dQr=−Vr−qIse−q
where, the desired currents are calculated by:
I∗se−d=P∗rVr−dI∗se−q=Q∗rVr−d
The injected voltage Vse is adjusted to be in-phase or anti-phase with the bus voltage. The injected voltage can be split into two components which are in-phase component " the real power", and in quadrature component “reactive voltage” with the transmission line current. The injected voltage with regular relationship with respect to the receiving-end voltage that achieves the required phase shift without change in the voltage magnitude.
In series impedance mode, the injected voltage is maintained to be in phase with the line current. The injected voltage compensates for the reactive components of the transmission system impedance when it is perpendicular to the line current and its magnitude is proportional to the current magnitude.
By controlling the magnitude and phase angle of the line current, the active and reactive power of the sending and the receiving ends can be controlled. The shunt inverter must supply the active power of the series converter.
3. UPFC CONTROL STRATEGY (Technique)
The UPFC control system has two main parts, the series converter controller and the shunt converter controller. The operation of each control is mainly dependent on the UPFC mode of operation.
3.1. SHUNT CONVERTER CONTROL
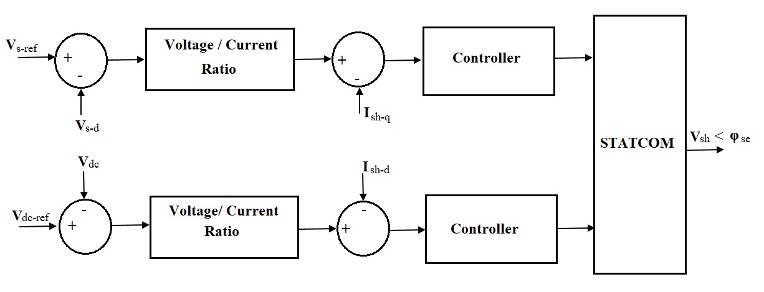
The shunt converter may provide reactive power to control the voltage magnitude at the UPFC’s sending end bus. If a constant dc terminal voltage is required, the shunt converter, also, needs to generate or absorb real power to the dc terminal as determined by the series converter. In contrast to the series converter, the shunt converter operates under a closed-loop current control structure whereby the shunt real and reactive power components are controlled independently. Therefore, the control strategy of the shunt converter will be different from that of the series converter. The block diagram for the shunt converter is shown in Fig.4

An instantaneous 3-phase set of the transmission line voltage Vs, at bus “s” is used to calculate the shunt magnitude and phase angle of The STATCOM current Ish is decomposed into its real or direct component Ish-d , and the reactive or quadrature component Ish-q , respectively. An instantaneous 3-phase set of measured Vs at bus “s” is decomposed into its direct component Vs-d , and quadrature component Vs-q, respectively. As seen in Fig.4, the d-axis current will be regulated by the dc voltage, and the q-axis current will be regulated by the d-axis voltage. If the dc capacitor voltage is allowed to vary according to the prevailing shunt compensation.
demand to reduce the converter losses and harmonics, then the shunt converter will control the angle φsh directly instead of Vsh-d . So that the shunt converter may keep a constant maximum voltage modulation ratio between the converter output voltage and the dc capacitor voltage. In this case, the shunt converter of UPFC will operate as a static Var compensation. In this section, a state feedback linearization control for the STATCOM to control the real power flow through the line, while regulating the voltage magnitude connected with the STATCOM is proposed.
ddtishd=−RshLshishd+ωishq+1Lshvsd−1Lshvshdddtishq=−RshLshishq−ωishd+1Lshvsq−1Lshvshq
The control inputs vshd and vshq will be
vshd=Lsh(ωishd−ushd)+vsdvshq=Lsh(ωishq−ushq)+vsq
Where ushd and ushq are the feedback regulating voltages.
ddtishd=−RshLshishd+ushdddtishq=−RshLshishq+ushq
To get the second order response described by the following transfer function
y(s)u(s)=kps2+(−a+kp)s+ki
where a is the system coefficient, and kp and ki are the PI-controller gains. By comparing with the second-order system with damping ratio ξ and undamped natural frequency we get;
ushd=(RshLsh−2ξωn)ishd+ω2n∫(iref(shd−ishd)dishd=kpishd+kiSishdushq=(RshLsh−2ξωn)ishq+ω2n∫(iref(shq−ishq)dishq
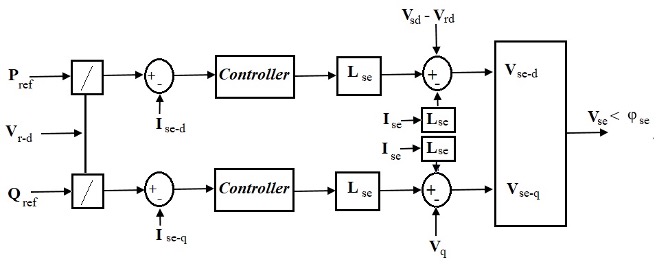
3.2. SERIES CONVERTER CONTROL
The control for the VSC2 (SSSC) works in such a way that the desired real and reactive power Pr* and Qr* are compared with the measured real and reactive currents (Ise-d and Ise-q), using an automatic power flow control the errors are passed through the controllable, which produces, with respect to the bus voltage. The direct and the quadrature components of the series injection voltage Vse-d and Vse-q, respectively, so, the magnitude of the series voltage and its phase angle and by adding a relative angle αse are calculated.
With proper converter control, this series connected voltage source Vse can vary rapidly and continuously to meet the requirement of fast tracking of the power reference, the series converter responds directly and independently to the demand for series voltage injection and changes in series voltage can be effected instantaneously. The control of the UPFC series converter is based upon the vector control approach, it can be seen that control of the power and the reactive power can be obtained by controlling the real and reactive components of the line current (Ise-d, Ise-q) , separately. By choosing the controller gain, the current ise-d and ise-q will be able to track the reference currents ise-d ref and ise-q ref in the desired way. The control block diagram is depicted in Fig.5

As shown from above figure a state feedback linearization control for the SSSC to control the real power flow through the line is proposed.
ddtised=−RseLseised+ωiseq+1Lse(vsd−vrd)+1Lsevsedddtiseq=−RseLseiseq−ωised+1Lse(vsq−vrq)+1Lsevseq
The control inputs vsed and vseq will be
vsed=Lse(ωised−used)+vsd−vrdvseq=Lse(ωiseq−useq)+vsq−vrq
Where used and useq are the feedback regulating voltages.
ddtised=−RseLseised+usedddtiseq=−RseLseiseq+useq
Similar to the shunt compensation control, we get;
used=(RseLse−2ξωn)ised+ω2n∫(iref(sed−ised)dised=kpised+kiSiseduseq=(RseLse−2ξωn)iseq+ω2n∫(ire(seq−iseq)diseq
3.3. UPFC CONVERTER CONTROL
A combination of a static shunt synchronous compensator – STATCOM, and static synchronous series compensator-SSSC, which are coupled via a common DC link, allows bi-directional flow of the real power between the series output terminals of the SSSC, and the shunt output terminals of the STATCOM, it is used to provide the real and the reactive series line compensation without an external energy source .
The following power flow control functions can be accomplished :
-
The terminal voltage regulation
-
The series line compensation with the terminal voltage control
-
The phase angle regulation with the terminal voltage control
-
The terminal voltage regulation with the series line compensation and the phase angle regulation
The UPFC has several operating modes. Two control modes are possible for the shunt control
-
VAR control mode: the reference input is an inductive or capacitive var request
-
Automatic Voltage control (AVC) mode: the aim is to maintain the transmission line voltage at the connection point to a reference value
The UPFC can be operated by the control of the series voltage, in the following different ways:
-
Direct voltage injection mode: the reference inputs are directly the magnitude and the phase angle of the series voltage
-
The phase angle shifter emulation mode: the reference input is phase displacement between the sending-end voltage and the receiving-end voltage
-
The line impedance emulation mode: the reference input is an impedance value to insert in series with the line impedance.
-
The Automatic power flow control mode: the reference inputs are the values of the active and reactive powers to maintain on the transmission line despite system changes.
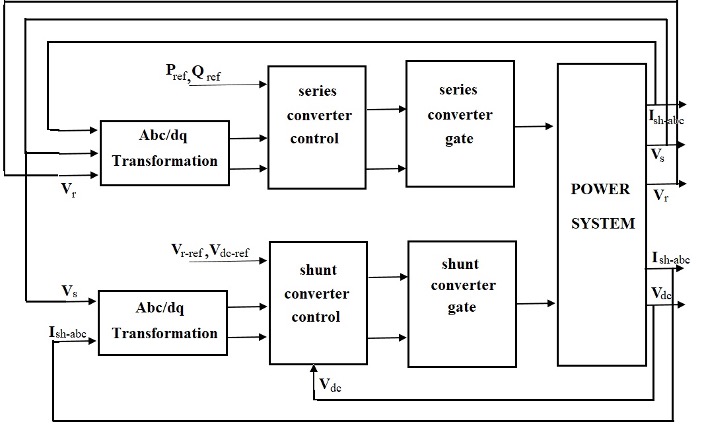
The overall block diagram of the UPFC control and the interface with the power system is shown in Fig.6

To characterize the behavior of the UPFC for the implementation of the automatic power flow controller using the series-connected SSSC, and the bus voltage control using the shunt-connected STATCOM.
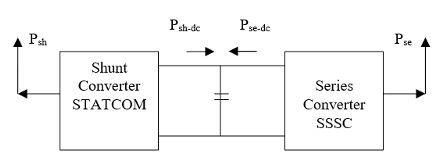
The voltage Vdc, across the dc link capacitor is maintained by the instantaneous power balance equation at both AC and dc sides of the two converters as sh own in Fig. 7

The power balance equation is given by:
Pse-dc+Psh-dc=0
Let
Pse−dc=f1(Pse)Psh−dc=f2(Psh)
Where, the ƒ1 and ƒ2 are selected to ensure the set value of the dc voltage. If, we want to control the active power only then;
Ps=Vse−dIse−d+Vse−qIse−q
Let assume, Vse-d =0
Then
I∗s−d=P∗rVr−dI∗s−q=Vr−d−Vs−dXse
If, we want to control the reactive power only then;
Qs=Vse−qIse−d−Vse−qIse−q
Let assume, Vse-q =0
Then
I∗se−q=Q∗rVr−dI∗se−d=Vr−dXse
3.4. VARIABLE STRUCTURE CONTROL
In any modeling task, two often-conflicting factors prevail “Simplicity” and “Accuracy”. These factors lead to desirable attributes for a system model “reduced computational and simplified structures”. These properties are of more concern for systems, with high dimension and composite interactions, referred to generally nonlinear systems.2,3
The nonlinearities and complexities can cause computational and analytical difficulties not only in modeling, control, or optimization, but also in the fundamental issues of stability, controllability, and observability. It is therefore natural to seek techniques that reduce the computational effort.
Generally, control of a nonlinear system is accomplished by linearizing the system’s equations and using feedback for example to place the system’s eigenvalues in the left-half of the complex plane. The disadvantage of this linearization method is that the feedback control is valid only in the neighborhood of the operating point about which the system’s equations were linearized [88-96]. Approaches and methodologies of nonlinear systems provide such techniques through the manipulation of system structure in some way. Thus there has been considerable interest in the research area of modeling, analysis, optimization and control of nonlinear dynamic systems.
4. Results and Discussions
4.1. SHUNT CONVERTER CONTROL
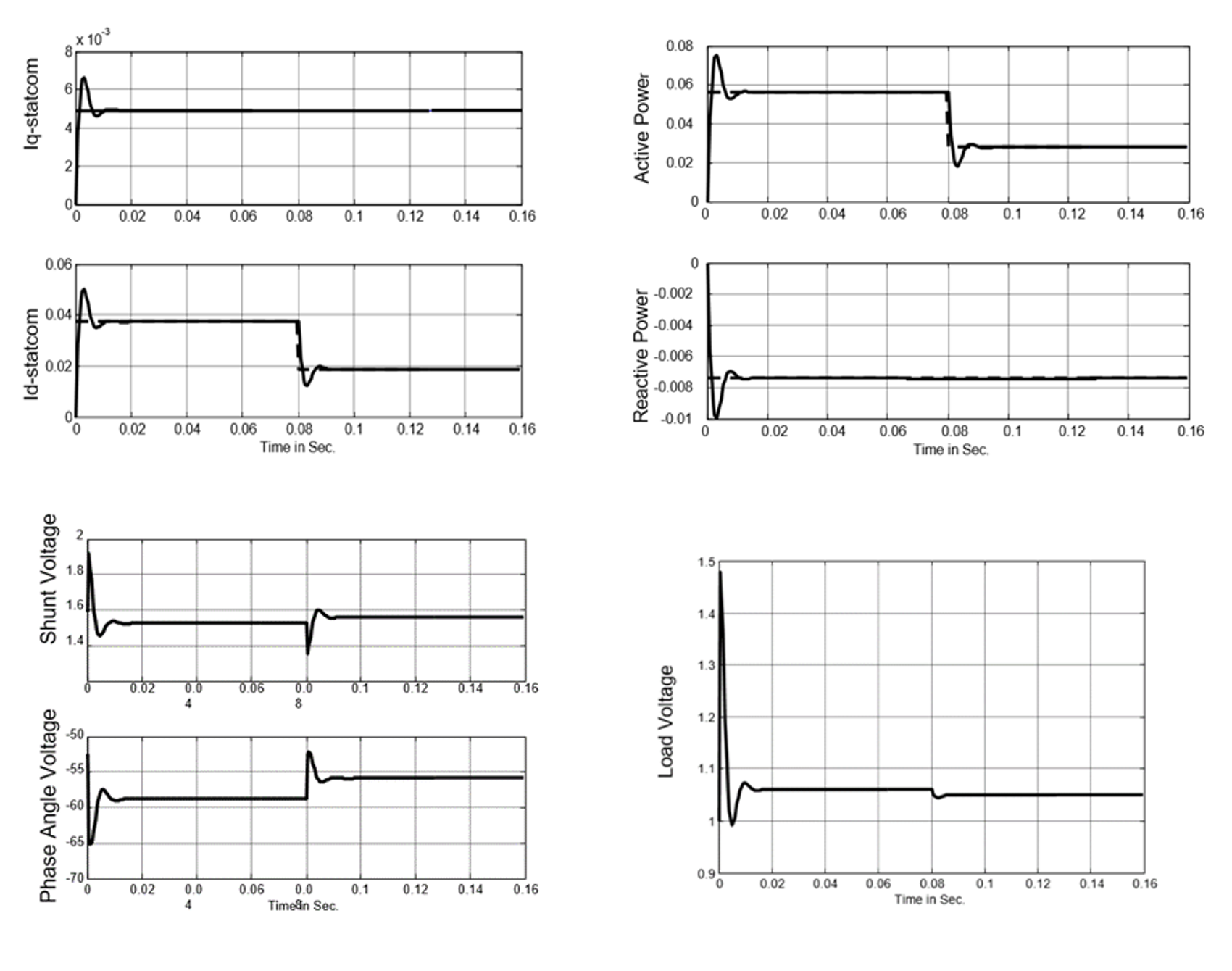
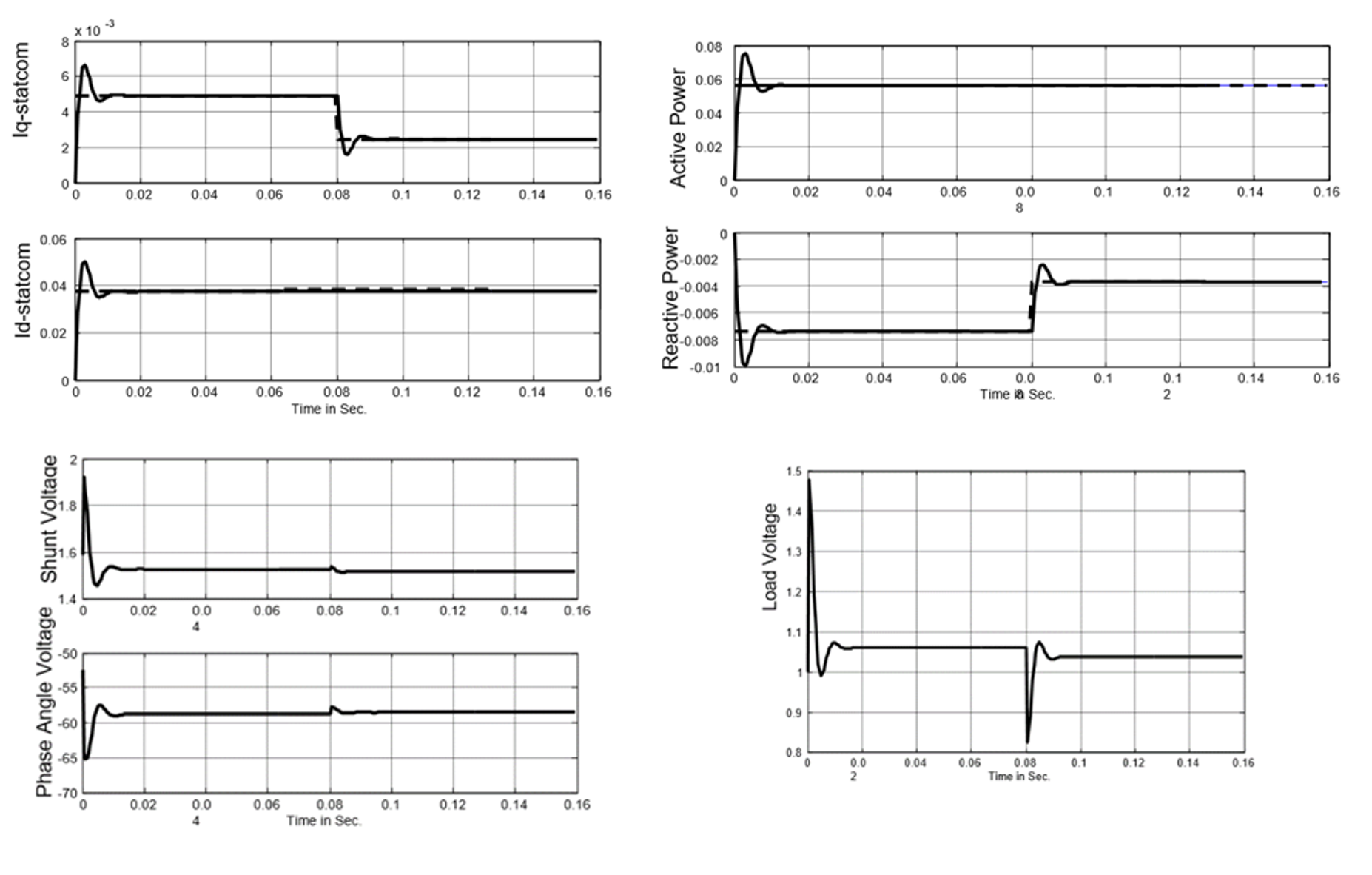
Fig.8 shows the change in the transient performance of the STATCOM compensation with PI-controller (kp=Rsh/Lsh -2ξωn, ki =ωn2, ξ=1.2, ωn=3.2/tsξ, and ts=0.01 sec.) using the approximate model [14,48]. In this test, the STATCOM command is to decrease the active power from P0 to P0-ΔP. The objective of the controller is to maintain the bus voltage and the reactive power unaltered.

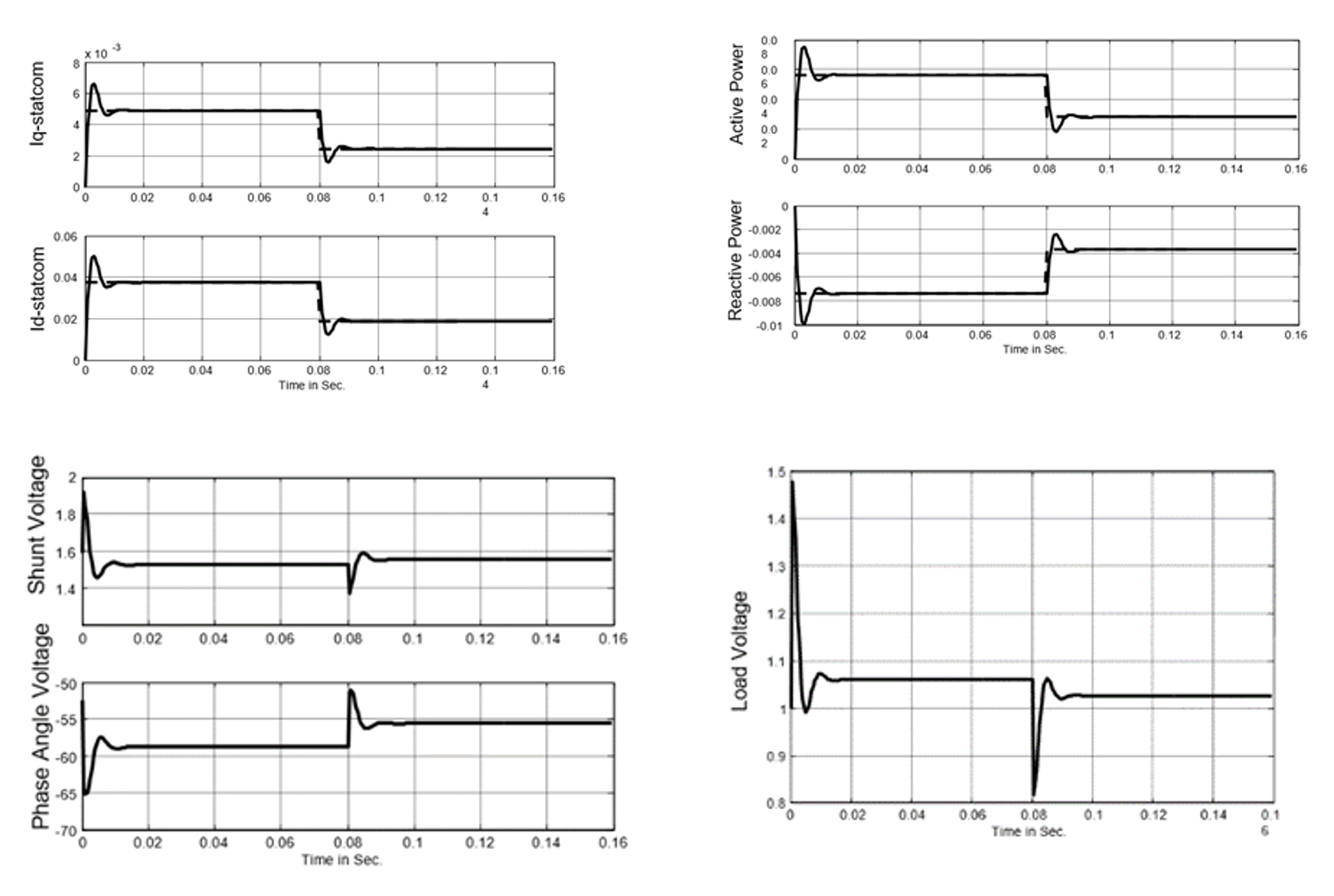
This case starts with the STATCOM slidling near the nominal value P0=0.058 p.u., the shunt converter regulated the bus voltage to 1.06 p.u. The STATCOM was commanded to decrease the real power to 0.024 p.u.. It did this by injecting a voltage about 0.05 p.u. roughly in quadrature with the bus voltage. Throughout this test, the bus voltage was tightly regulated at 1.05 p.u. and the reactive power on the line maintained constant. In Fig. 8 shows the change in the transient performance of the STATCOM compensation with PI-controller using the approximate model. In this test, the reactive power is decreased from Q0 to Q0-ΔQ0, while the objective of the controller is to regulate the bus voltage and keep the active power constant.
as shown in the figure 9 above, the STATCOM was commanded to decrease the reactive power to -0.004 p.u. Throughout this test, the bus voltage was tightly regulated at 1.05 p.u. and the active power on the line maintained constant. Fig. 10 shows the change in the transient performance of the STATCOM compensation with PI-controller using the approximate model. In this test, the active and reactive power from P0 to P0-ΔP0, and Q0 to Q0-ΔQ0, while the objective of the controller is to regulate the bus voltage.


Figure 10 below illustrate the STATCOM was commanded to decrease the active and reactive power. Throughout this test, the bus voltage was tightly regulated at 1.05 p.u. and the active power on the line maintained constant.
4.2. Series Converter Control
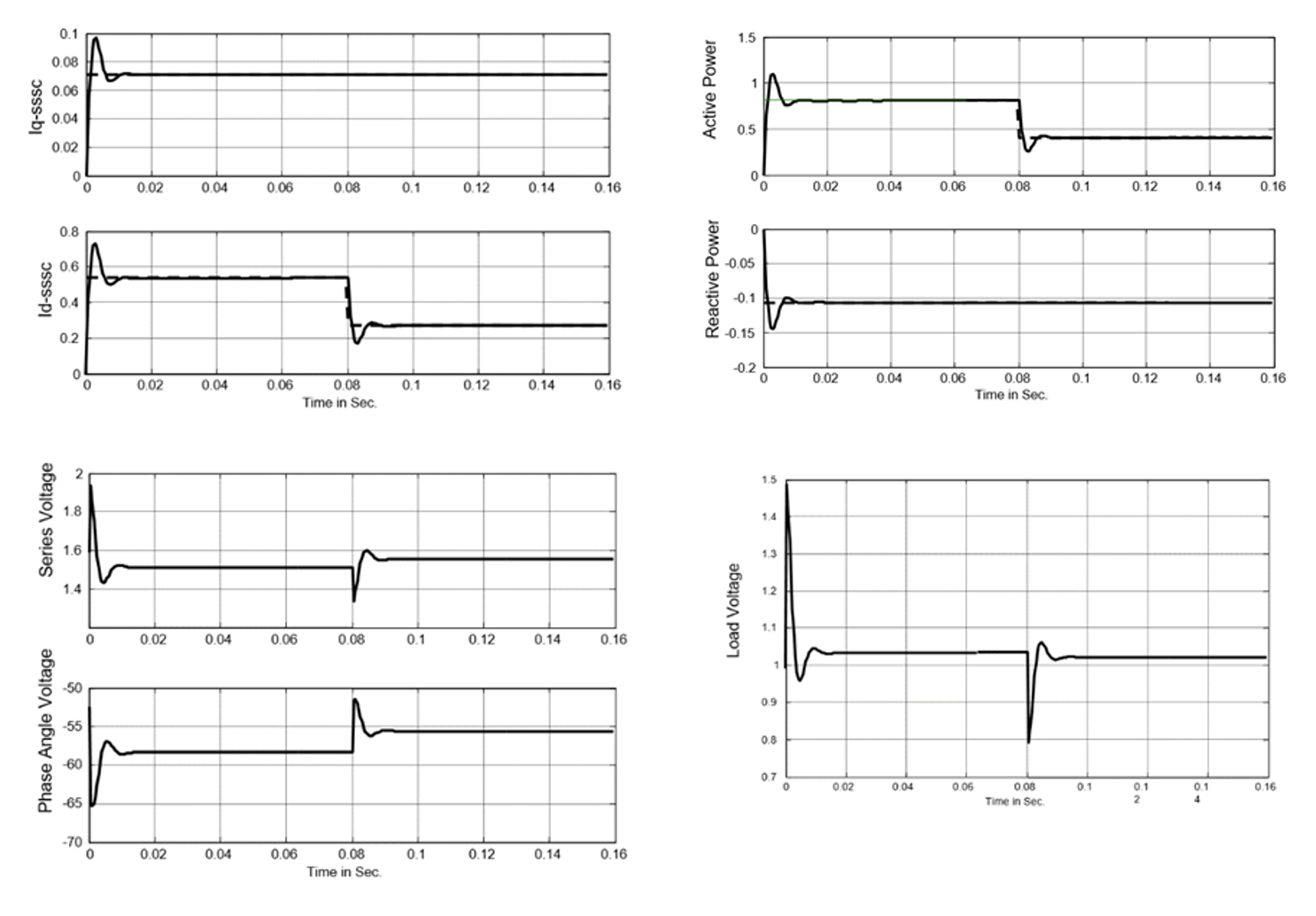
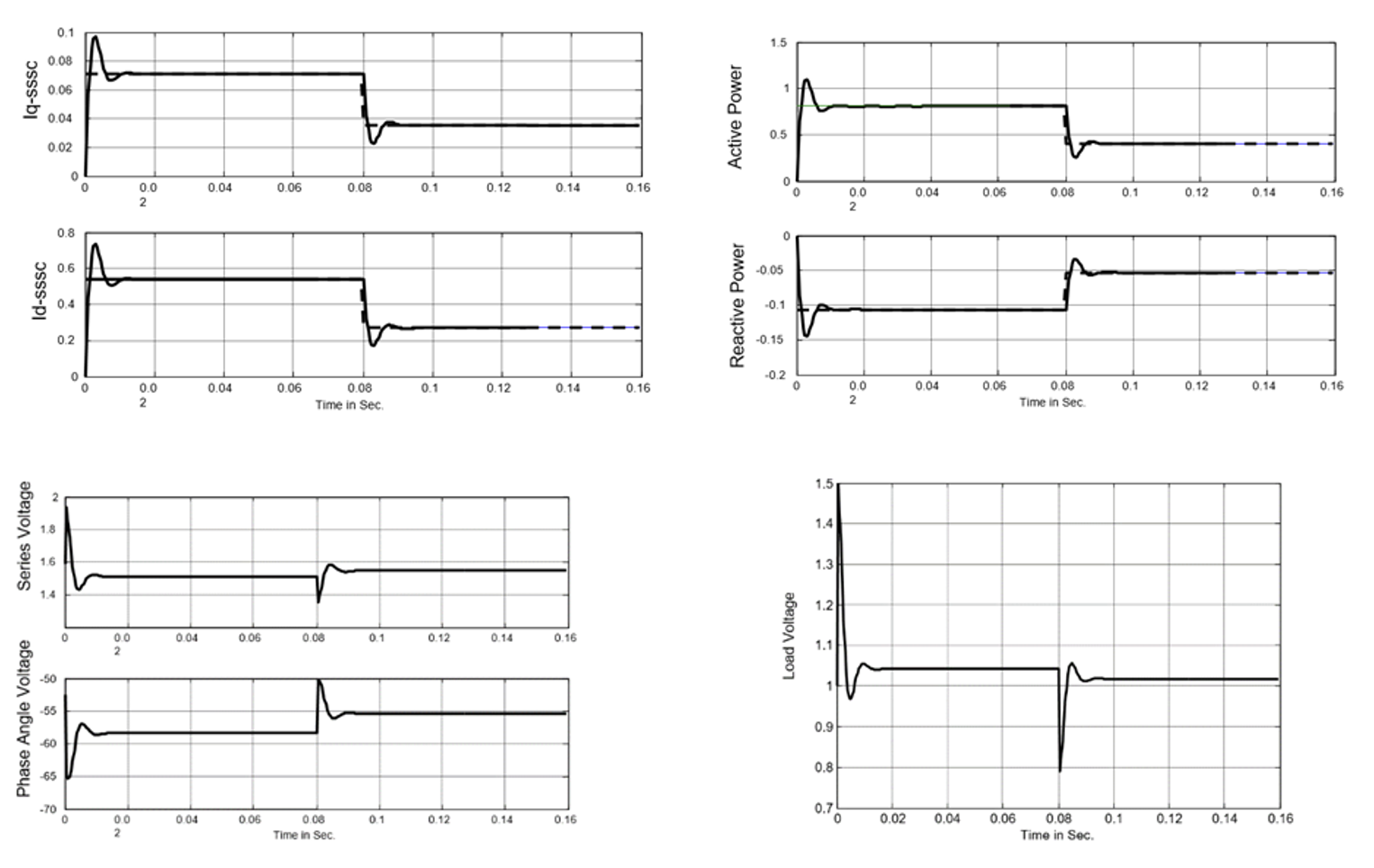
Figure 11 illustrate the change in the transient performance of the SSSC compensation with PI-controller using the approximate model. In this test, the active power is decreased from P0 to P0-ΔP, while the objective of the controller is to maintain the bus voltage and the reactive power unaltered.

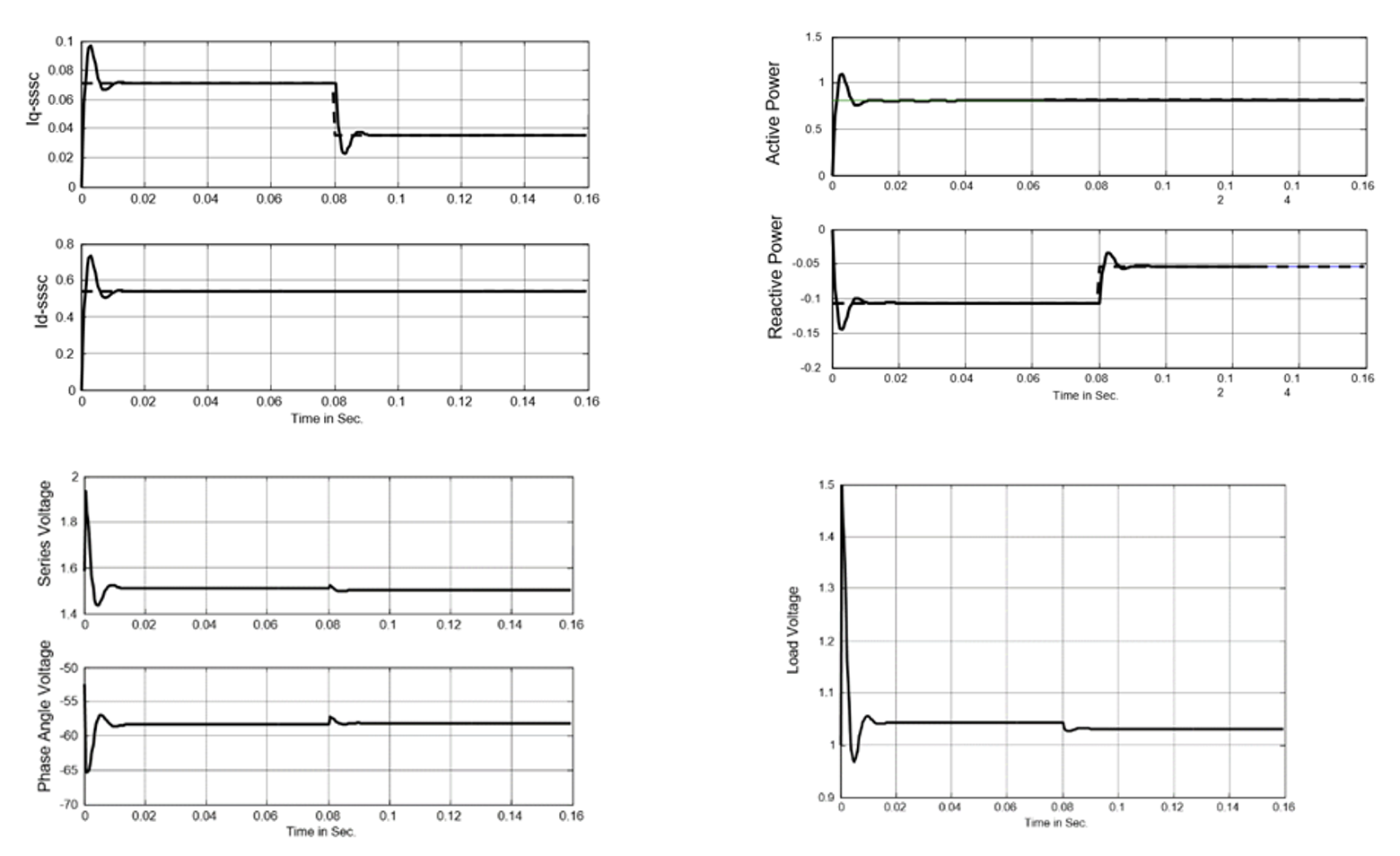
Figure 12 shows the change in the transient performance of the SSSC compensation with PI-controller using the approximate model. In this test, the reactive power from Q0 to Q0-ΔQ0, while the objective of the controller is to regulate the bus voltage and keep the active power, constant.

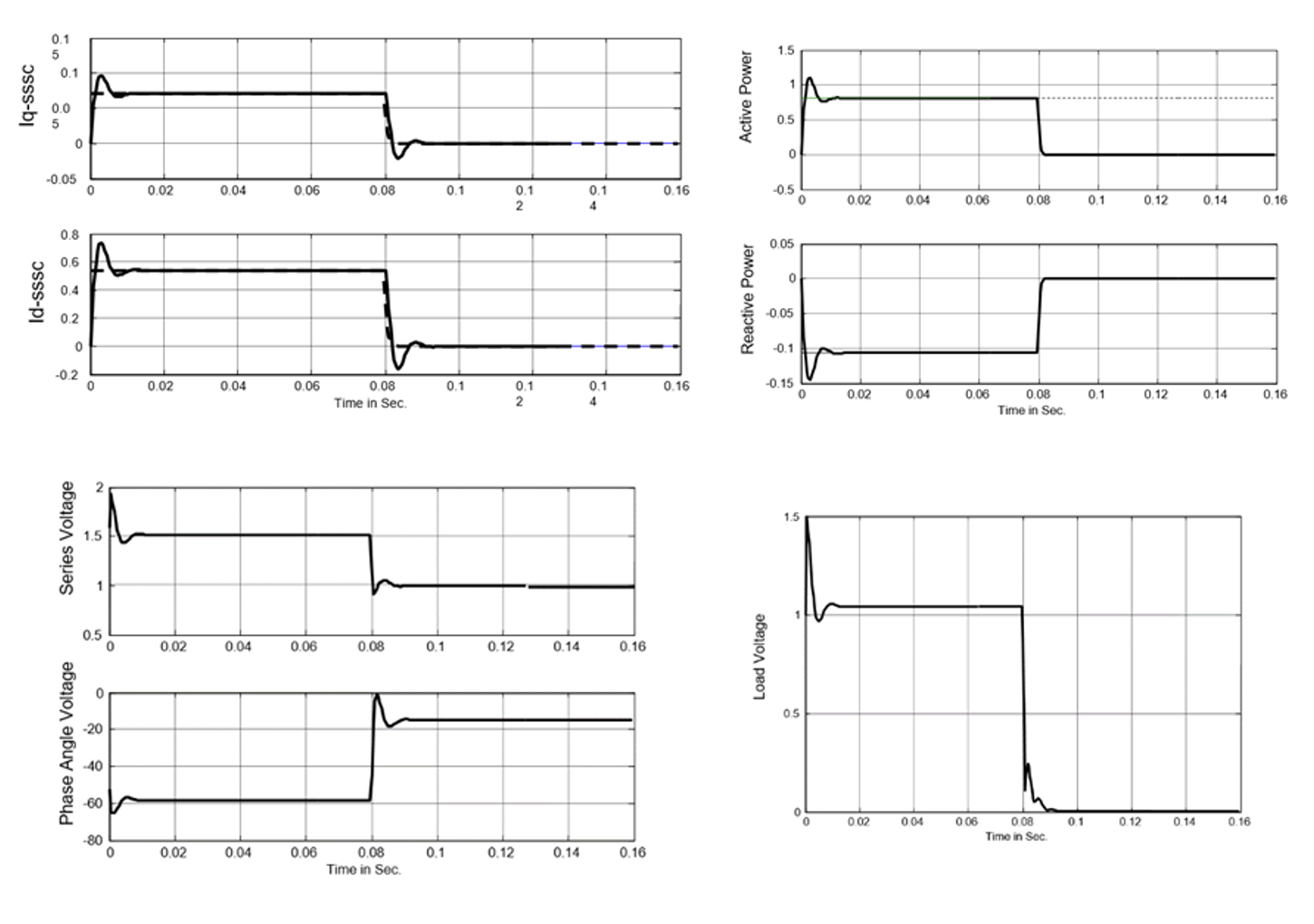
Figure 13 shows the change in the transient performance of the SSSC compensation with PI-controller using the approximate model. In this test, the active and reactive power are decreased from P0 to P0-ΔP0, and Q0 to Q0-ΔQ0, while the objective of this test is to regulate the bus voltage.

Figure 14 shows the change in the transient performance of the SSSC compensation with PI-controller using the approximate model. In this test, the bus voltage is decreased from V to V-ΔV. The objective of the controller is to produce a voltage change.

It is very interesting to note that the changes in the active and reactive powers “P,Q” at the line terminals are balanced by equal and opposite changes in the reactive output of the shunt converter, which acts to maintain the bus voltage. The UPFC reference for the active and reactive powers are changed from P to P-ΔP and from Q to Q-ΔQ, the UPFC forces the change by injecting about Δvse in anti-pahse with vs, the line voltage vr is consequently reduced in magnitude, or in-phase with vs, so that, the line voltage vr is increased.
5. CONCLUSION
This research analyzes the effects of the UPFC control factors on the transmitted power system. The in-phase component of the series injected voltage dominates the reactive power while the quadrature component affects the real power. In this paper, the STATCOM and the SSSC control strategies are analyzed, and the UPFC model which is suitable for both steady-state analysis and dynamic stability analysis of power system is developed. From the viewpoint of conventional control. The unified power flow controller can provide real-time control of all or any combination of the power system parameters which determine the transmittable power. Thus, the UPFC can fulfill all the functions of reactive shunt compensation, series compensation thereby meeting multiple power flow control objectives. However, the UPFC can also be viewed as a generalized power flow controller that is able to maintain prescribed and independently controllable real power and reactive power in the line. The capability of the UPFC to force and maintain strategically chosen values of the active power and the reactive power at a given point of the line by PI-control.